

Object locomotion mode identification method and device based on depth image sequence
A depth image and motion pattern technology, applied in character and pattern recognition, instruments, computer parts, etc., can solve the problems of inappropriate gesture recognition, affect shape accuracy, blur depth map, etc., and achieve effective motion or action recognition. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] Embodiments of the present invention are described below in conjunction with the accompanying drawings.
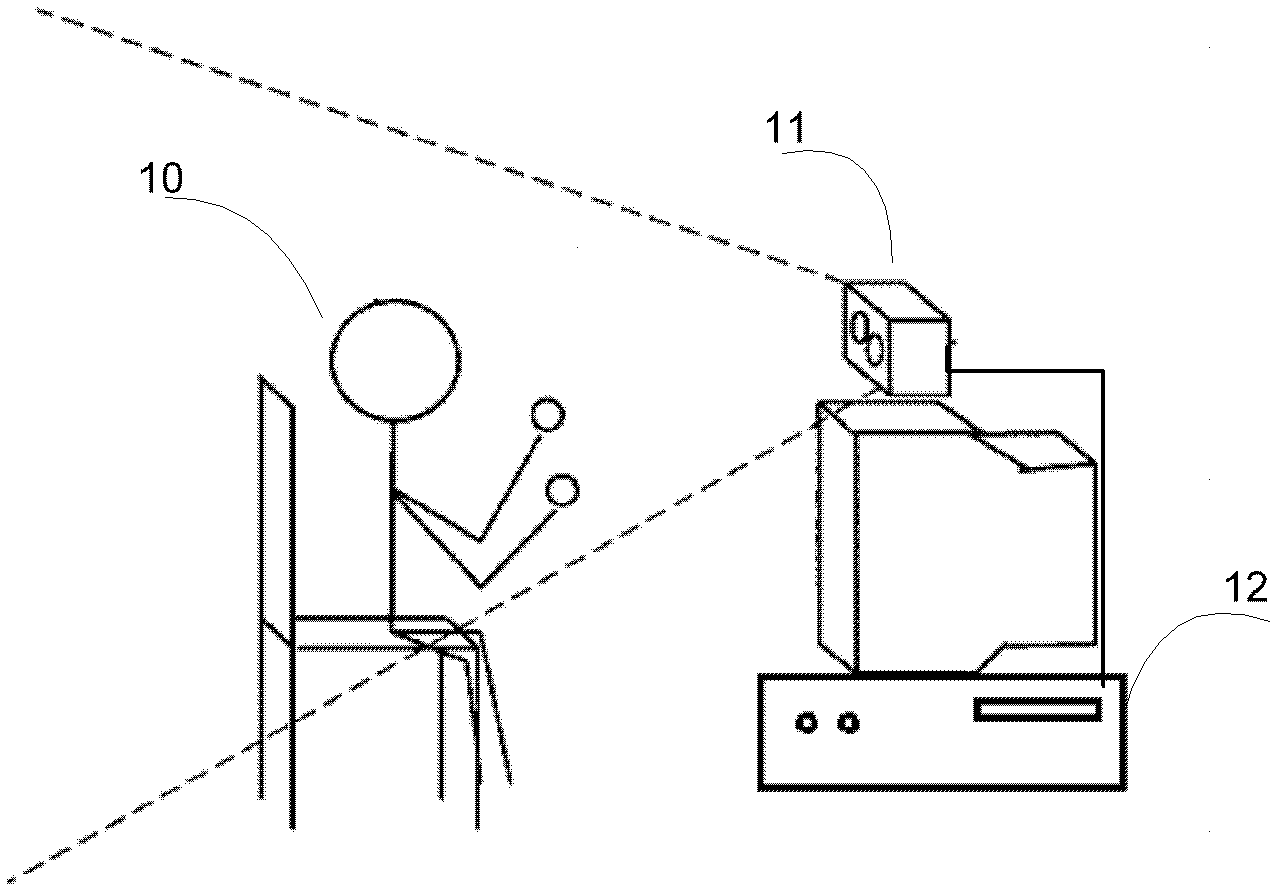
[0026] figure 1 It is a schematic diagram exemplarily showing the application environment of the object motion pattern recognition method and device based on the depth image sequence according to the embodiment of the present invention.
[0027] refer to figure 1 , the embodiment of the present invention can be applied to human-computer interaction. The person and his gesture 10 are captured by the depth camera 11 and sent to the computer system 12 for recognition and control. The final recognition and response can be displayed on a local or remote screen. Wherein, the depth camera 11 may be an infrared camera capable of acquiring a depth image of a scene. The computer system 12 can be a personal computer (PC) or any other computer with data processing capabilities, a server or a digital signal processor (DSP), etc. For the depth image sequence acquired and import...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More