

Wearable hand function rehabilitation training manipulator
A rehabilitation training and manipulator technology, applied in the field of rehabilitation robots, can solve the problems of easily damaged fingers, hand injuries, lack of thumb rehabilitation devices, etc., and achieve the effect of preventing finger damage, preventing secondary injuries, and comprehensive rehabilitation treatment.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
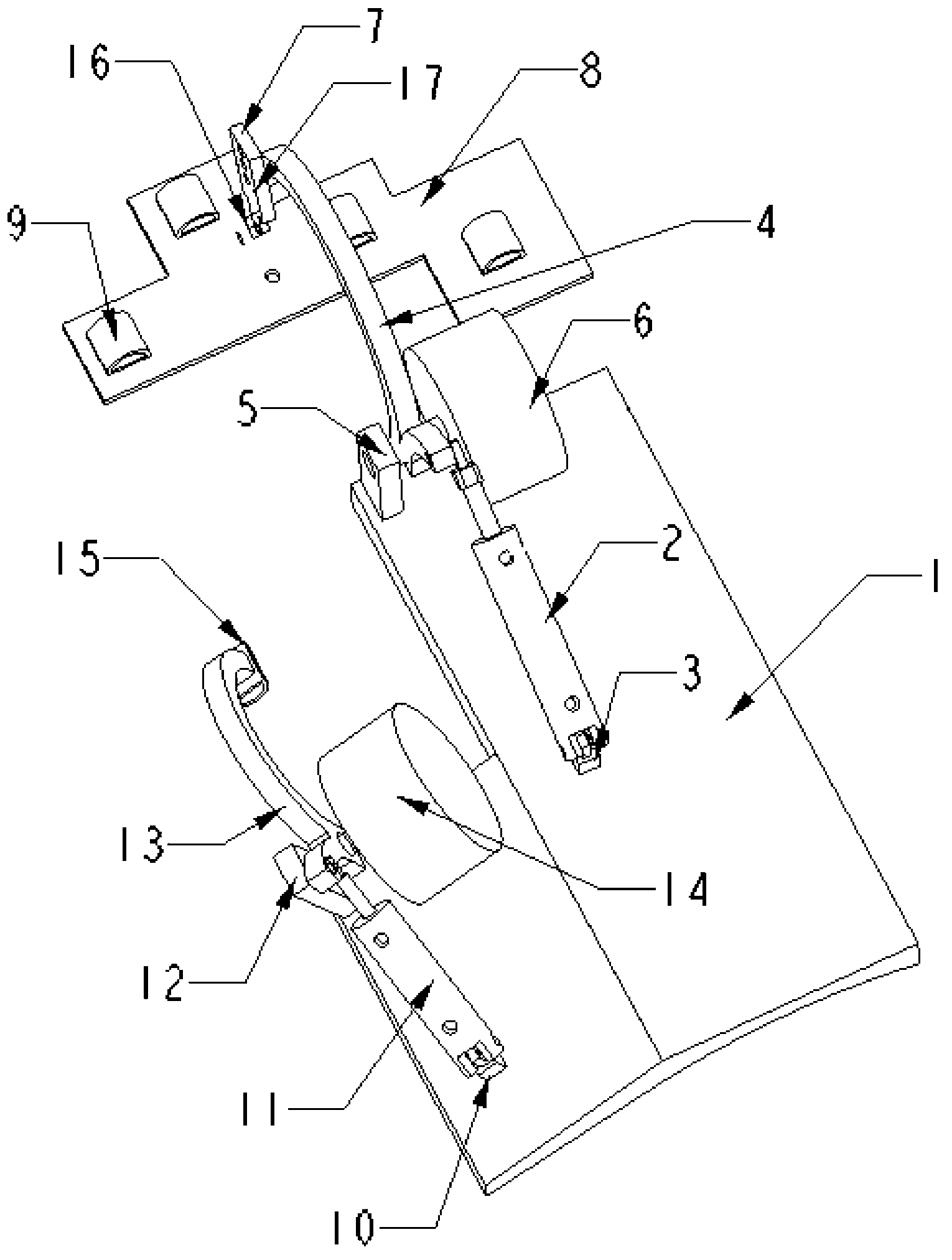
[0021] This embodiment describes a wearable hand function rehabilitation training manipulator, its structure is as follows figure 1 As shown, it includes a manipulator fixing plate 1 fixed on the arm, a thumb rehabilitation mechanism and a four-finger rehabilitation mechanism. The upper side plane of the manipulator fixing plate 1 is used to fix the mechanical structure of the hand, and the lower part is an arc-shaped surface to adapt to the structure of the human hand. Fixed on the hand by a bandage, the thumb rehabilitation system includes a powered cylinder drive system, a thumb fixation device connected to the cylinder drive system, and the four-finger rehabilitation mechanism includes a powered cylinder drive system, four fingers connected to the cylinder drive system Fixtures.
[0022] The cylinder drive system of the four-finger rehabilitation system includes a cylinder 2 and a cylinder base 3. The power output end of the cylinder 2 that provides power for flexion and e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More