Capsule robot for gastrointestinal endoscopy, and control system thereof
A capsule robot and endoscopic inspection technology, applied in the field of endoscopic inspection, can solve the problems of not fundamentally solving the driving force, difficult to find intestinal fold disease, and inability to expand intestinal tract, so as to improve the detection rate of diseases , shorten the examination time, and reduce the effect of patients' discomfort
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
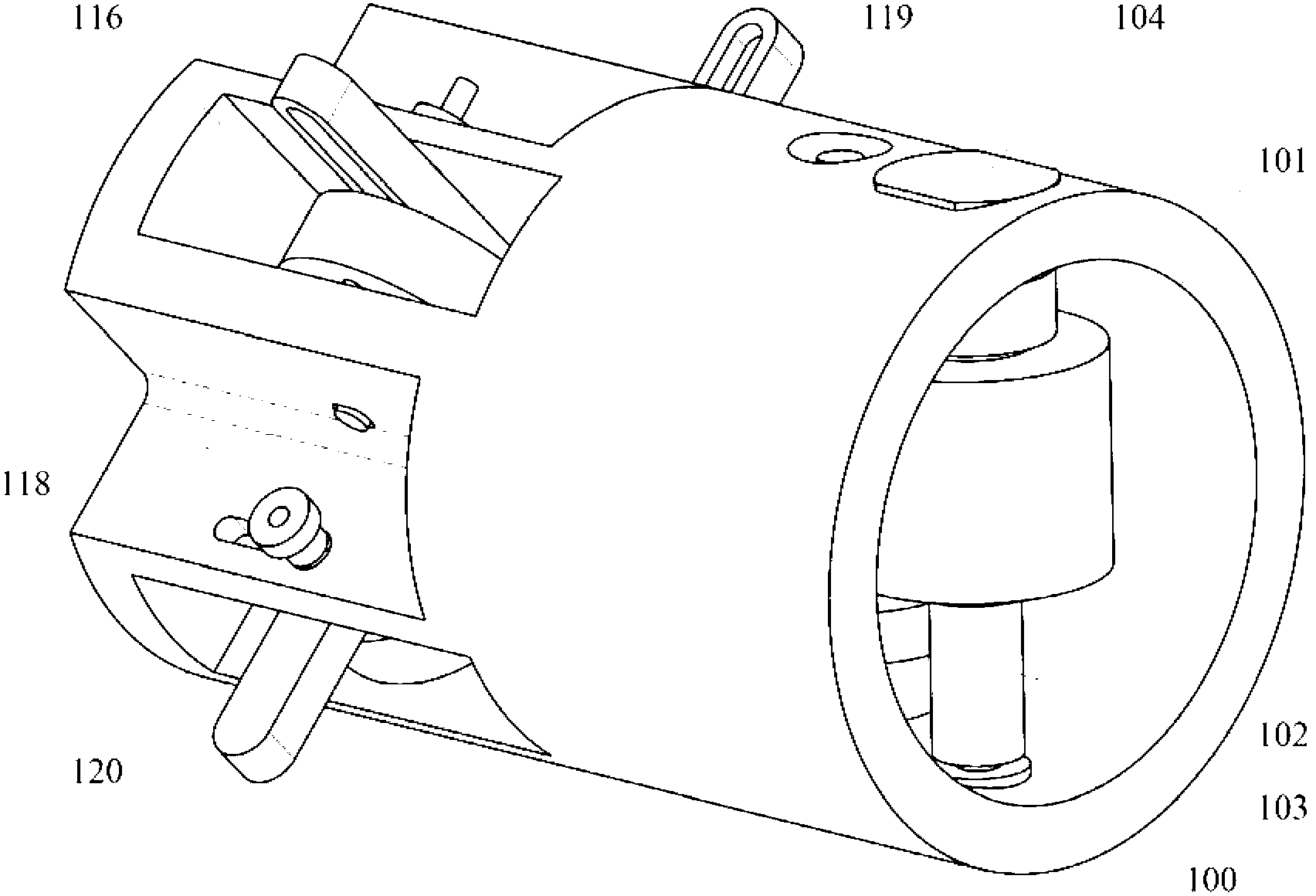
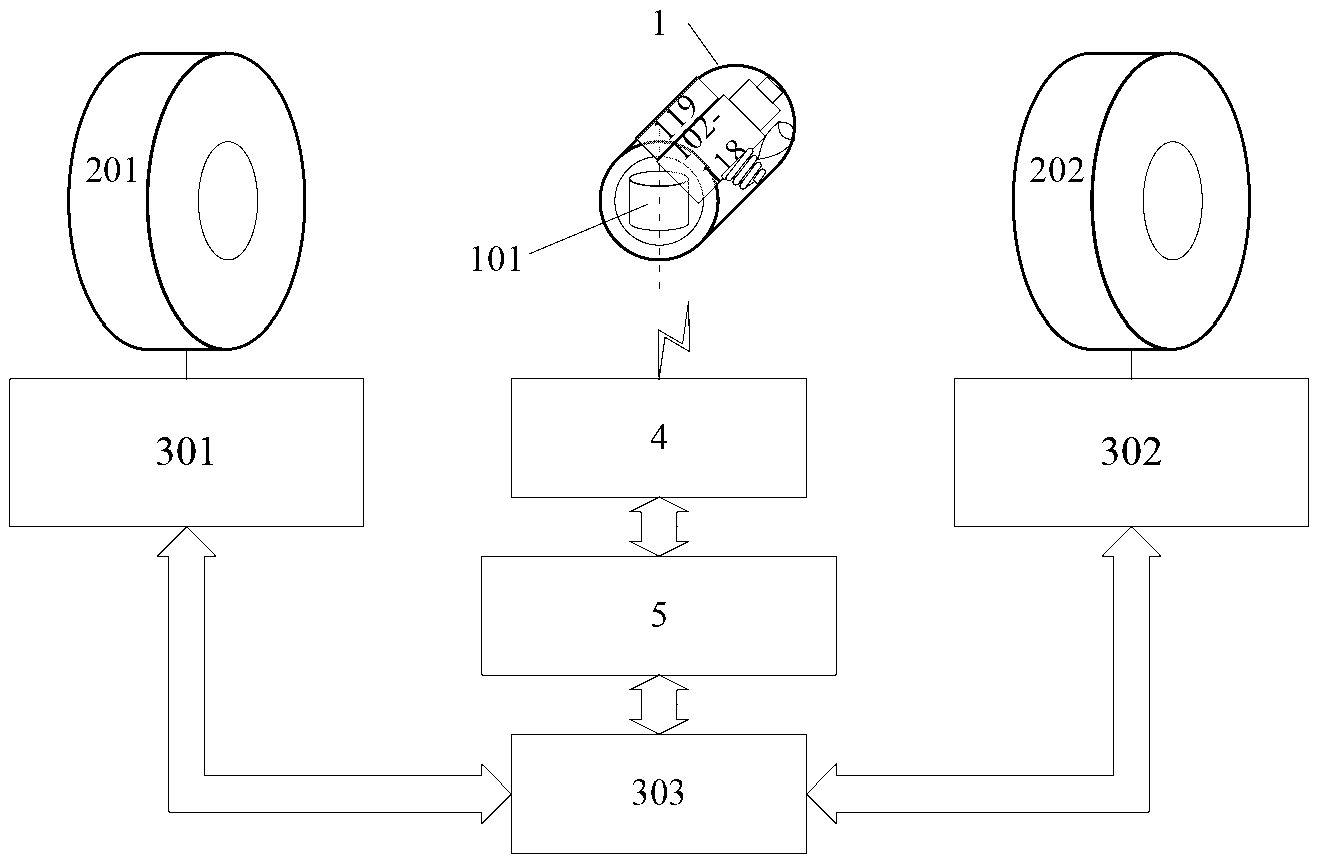
[0033] figure 1 is a schematic diagram of the main structure of the capsule robot according to the present invention, figure 2 is a system schematic diagram of the capsule robot motion control system according to the present invention. Such as figure 1 and figure 2As shown in , the capsule robot according to the present invention is used as an oral capsule, which can be directly swallowed by the patient who is the object of examination, and then the patient lies down on the hospital bed to receive the examination. As a specific structural form, for example, manipulators 301 and 302 can be res...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com