

Flexible mechanical arm vibration reducing device and method based on controllable rigidity and controllable damp
A technology of flexible manipulator and vibration damping device, which is applied in manipulator, claw arm, vibration suppression adjustment, etc., can solve the problems such as the difficulty of implementing large-scale vibration control of flexible manipulator and the inability to make reasonable changes in the damping of vibration absorber, etc. Basic science and simple and feasible, simple structure, good effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific examples, but the implementation of the present invention is not limited thereto.
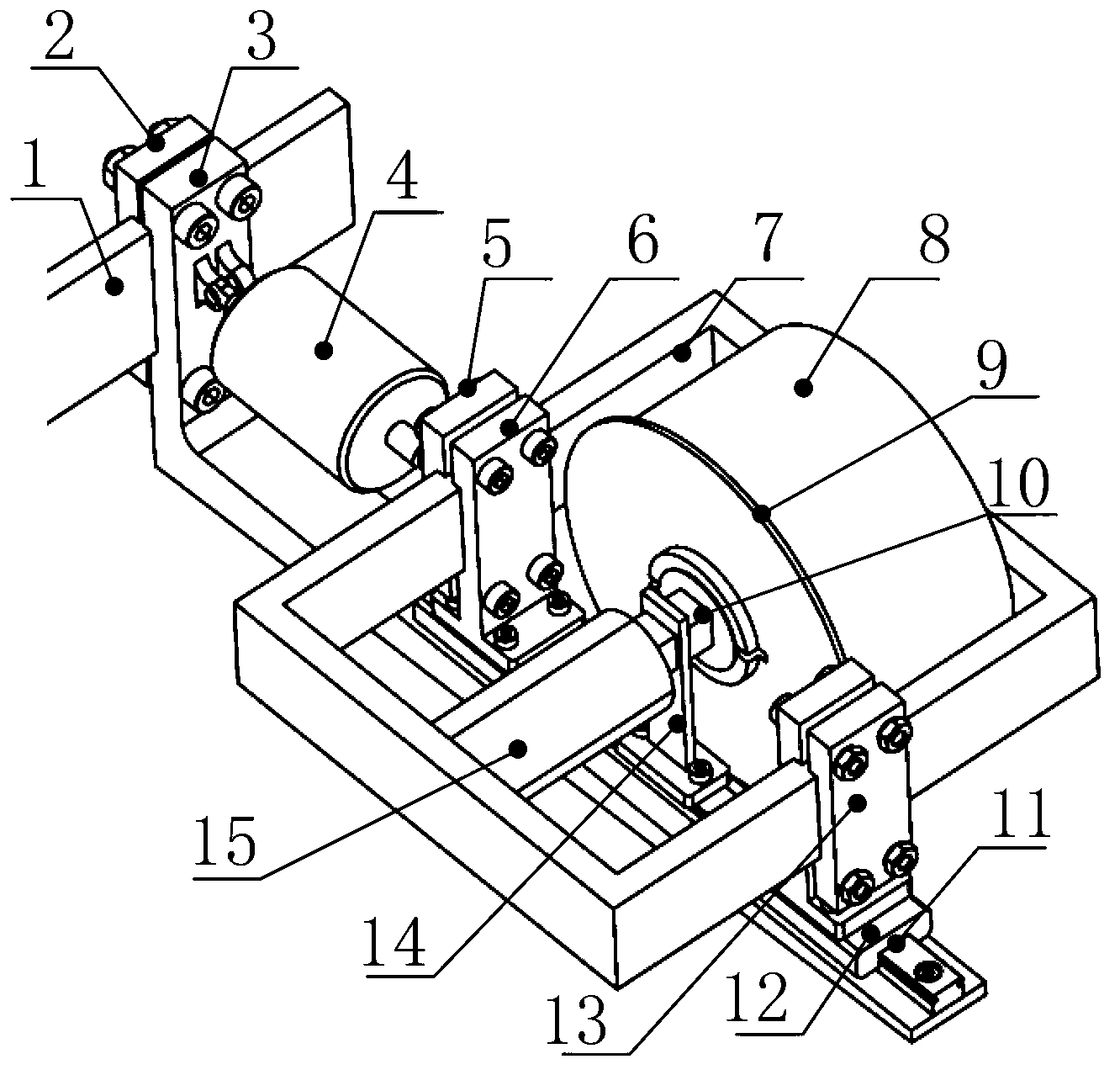
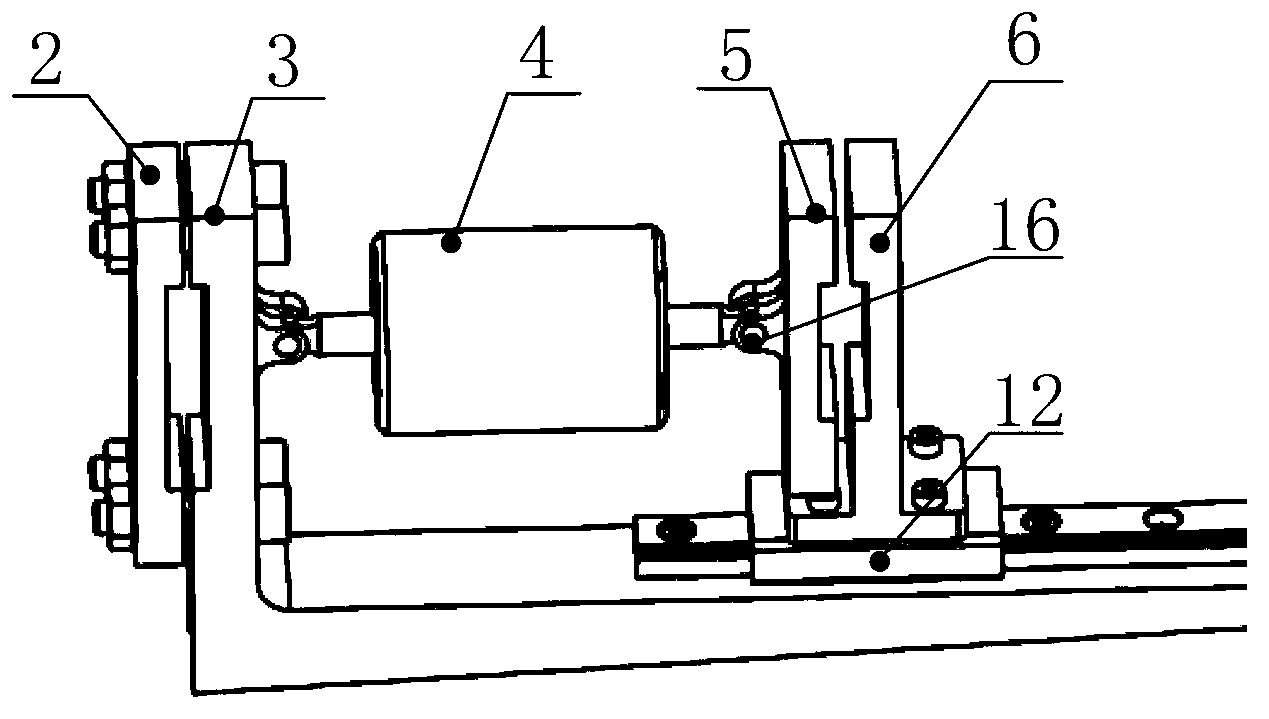
[0036] Such as figure 1 As shown, the present invention is based on a flexible manipulator vibration damping device with controllable stiffness and controllable damping, which is characterized in that it includes a flexible manipulator, a magneto-rheological damping device installed on the flexible manipulator and a linear guide rail for connection components, where:
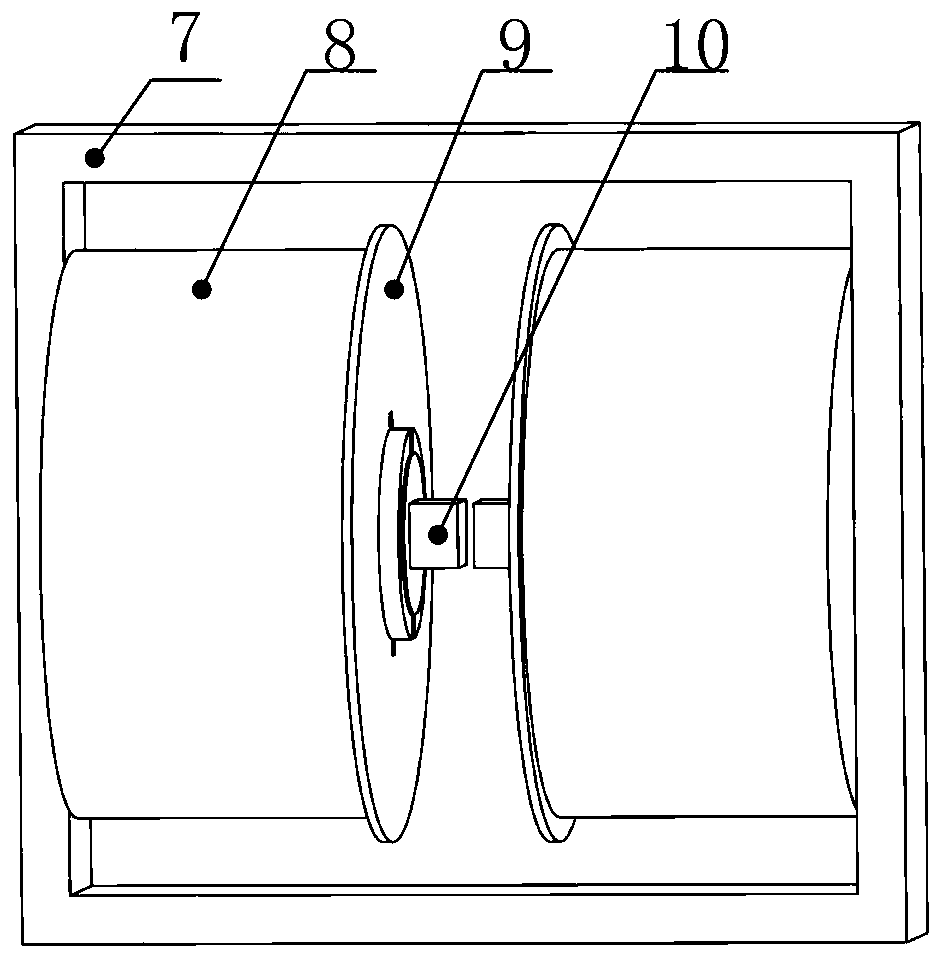
[0037] The flexible manipulator 1 is the vibration control object. The magnetorheological damping device is composed of a magnetic circuit iron core 7, an excitation coil 8, a coil baffle 9, a magnetorheological elastomer 10 and a magnetorheological fluid damper 4. The linear guide rail assembly It is installed by flexible manipulator splint 2, guide rail installation beam 3, linear guide rail 11, sli...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More