

Direct-current voltage control unit and method for wind power generation system
A wind power generation system, DC voltage technology, applied in wind power generation, electrical components, single-grid parallel feeding arrangement, etc., can solve problems such as small interference stability of DC voltage needs to be improved, and achieve the ability to maintain fault ride-through, avoid damage, The effect of enhancing the stability of small disturbances
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034]In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention. In addition, the technical features involved in the various embodiments of the present invention described below can be combined with each other as long as they do not constitute a conflict with each other.
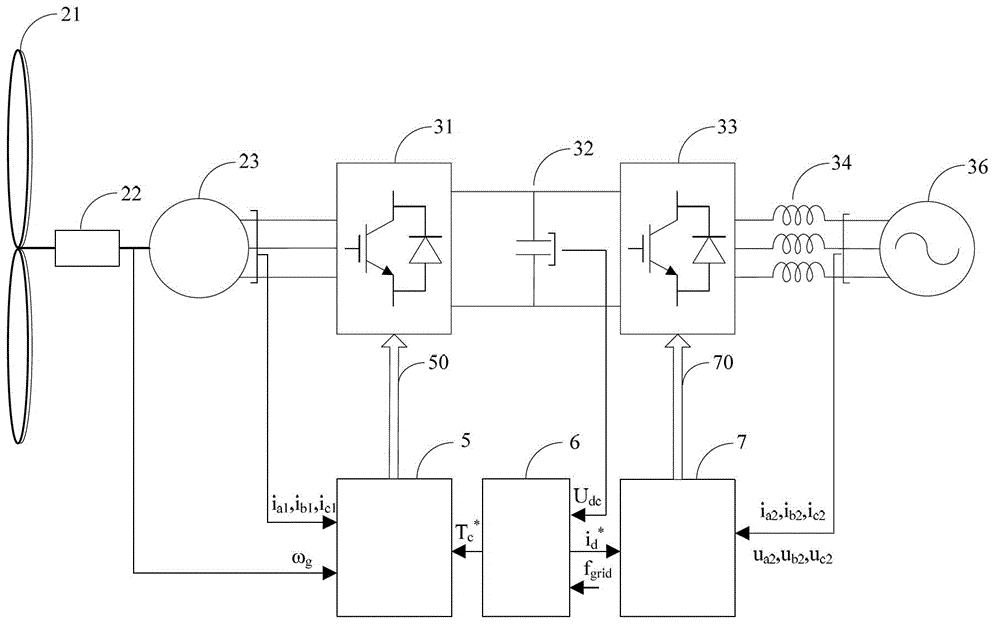
[0035] figure 1 It is a schematic diagram of the overall principle of the DC voltage control unit according to the present invention. like figure 1 As shown in , the application object of the DC voltage control unit according to the present invention is, for example, a full-power wind power generation system. As is well known in the art, the wind power generation system includes a wind turbine ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More