Ankle joint boosting method with reverse drivability
An ankle joint, reverse technology, applied in the direction of equipment to help people walk, physical therapy, etc., can solve the problems of cumbersome control and complex mechanism, and achieve the effect of high control precision, saving mechanical structure and easy realization.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention will be further described below in conjunction with the embodiments and accompanying drawings, but the present invention is not limited.
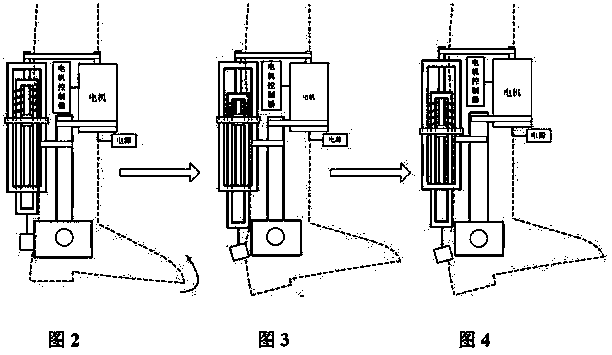
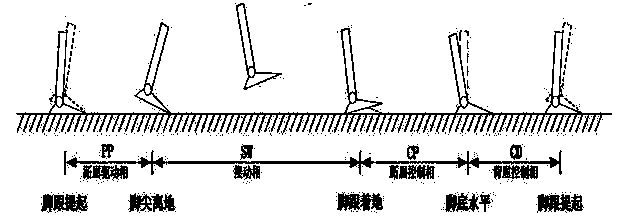
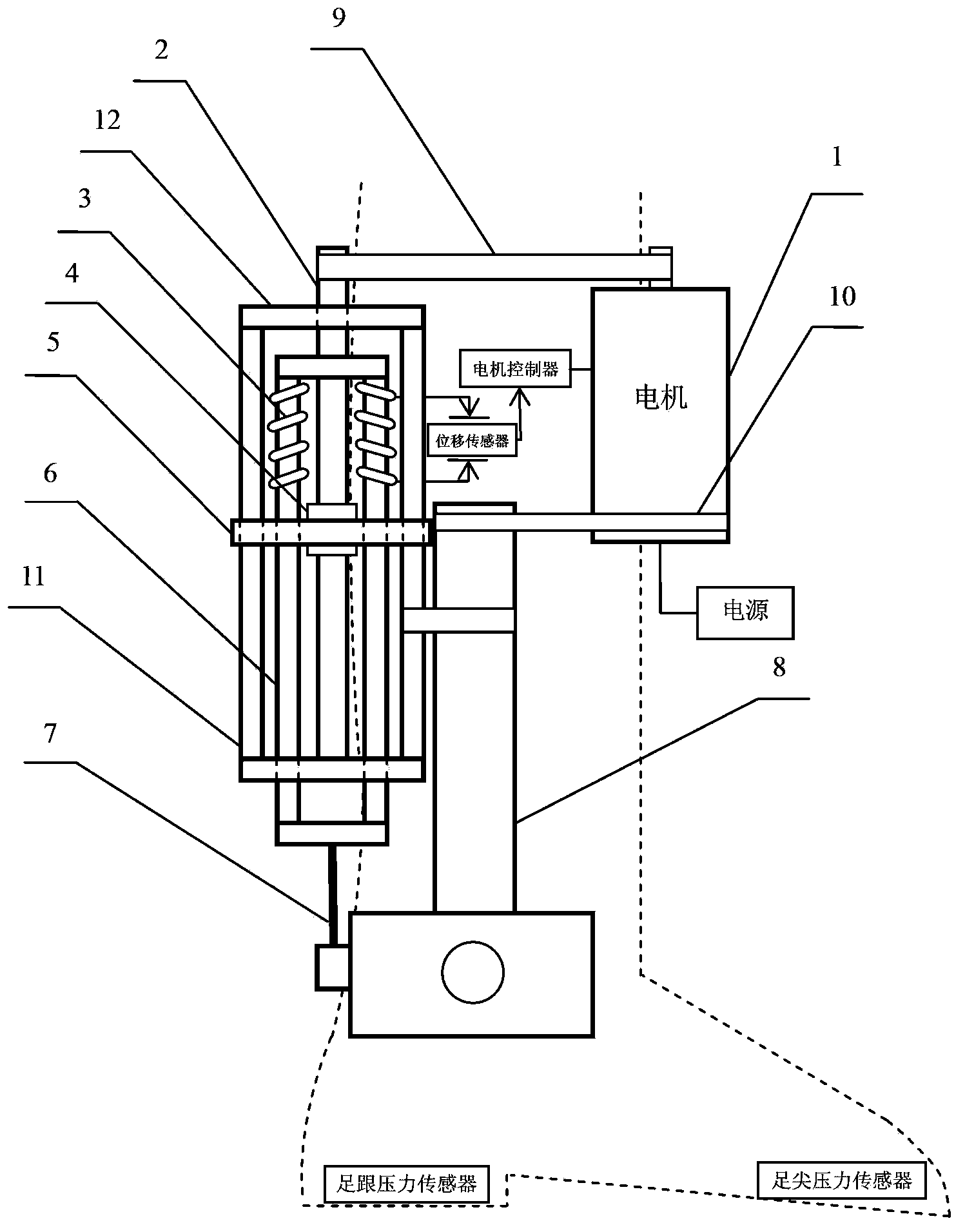
[0038] The ankle joint assisting method with reverse drivability provided by the present invention can realize assisting ankle joint walking. The method is as follows: the ball screw 2 converts the forward rotation motion of the motor 1 into a linear motion, drives the pressure plate 5 upward, and passes Squeeze the spring 3 to lift the guide rod 6 upwards, and pull the heel of the human body through the wire rope 7 to help the human body realize the plantar flexion drive around the ankle joint and provide walking assistance. Reverse drivability during boosting consists of two parts. In the plantarflexion and dorsiflexion control phase, it is realized by the longitudinal compression yield of the wire rope. In the swing phase, the slight dorsiflexion of the human body causes the spring 3 to be compressed, and th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More