

Double-finger double-driving translation clamping type flexible grip and control method
A dual-drive, clamping technology, applied in the direction of collets, manipulators, manufacturing tools, etc., can solve the problems of poor flexibility and lack of force perception ability of flexible grippers, and achieve easy open modular configuration and improved force control accuracy , the effect of improving flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention is described in detail below in conjunction with accompanying drawing:
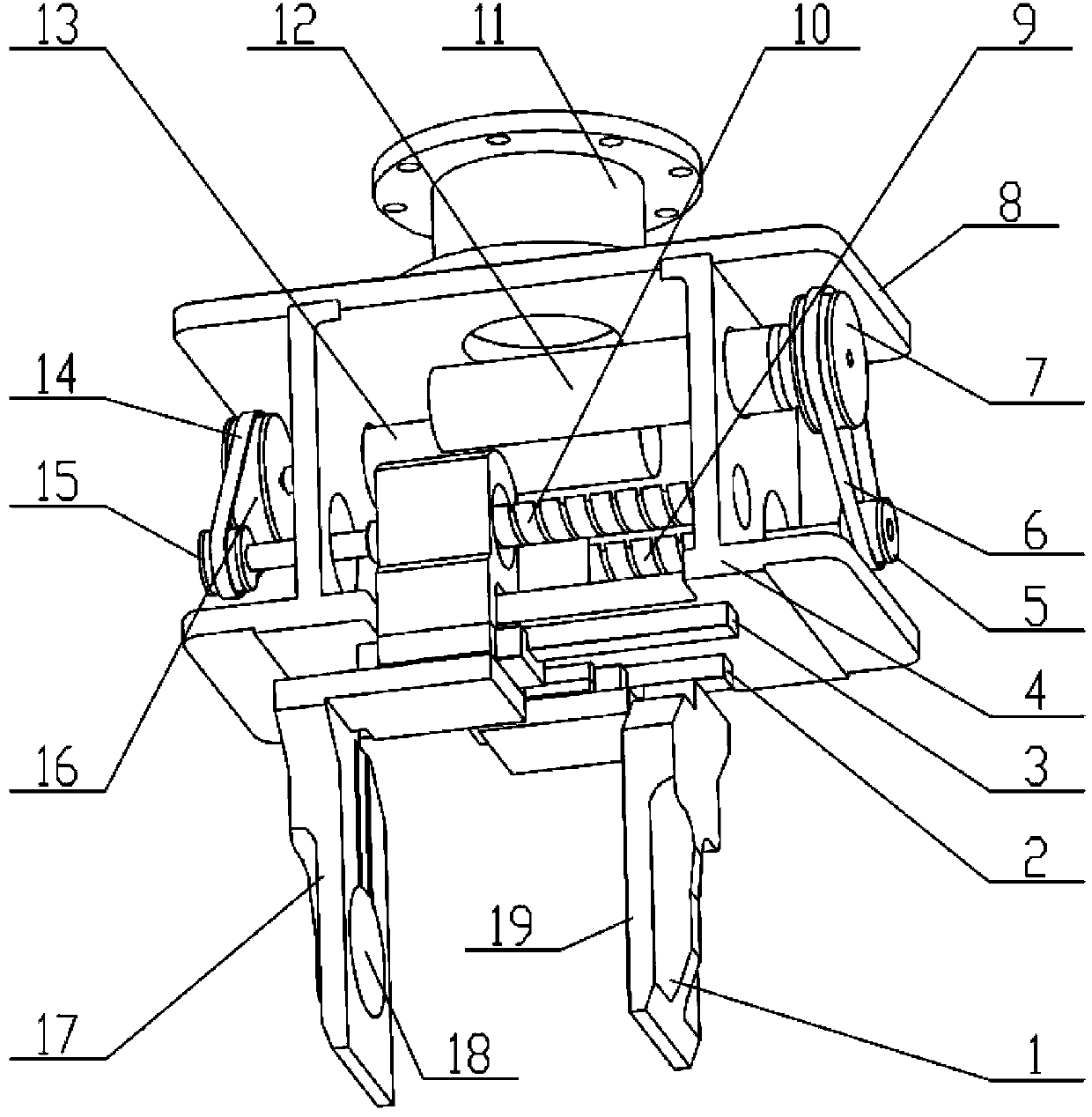
[0036] Such as figure 1 As shown, the gripper includes a left finger 17 and a right finger 1, the left finger 17 and the right finger 1 are arranged under the main frame 4, and the left finger 17 and the right finger 1 pass through the lead screw 33 respectively. Under action, it can slide back and forth along the sliding guide rail on the main frame 4, and the left finger 17 and the right finger 1 are respectively driven by a set of drive systems. The left finger 17 is equipped with a left finger force sensor 18, and the right finger 1 is equipped with a right finger sensor 19.
[0037] The driving system of the left finger 17 includes a left finger motor 13, and the left finger motor 13 drives the synchronous pulley I16, and the synchronous pulley I16 drives the synchronous pulley II15 through the synchronous toothed belt I14, and the output shaft of the synchronous pulley ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More