

Mechanical arm clamping machine
A gripping machine and manipulator technology, which is applied to conveyor objects, transportation and packaging, etc., can solve the problems of occupying large space resources, manual operation, low efficiency, etc., and achieve the effect of good applicability, high work efficiency and low cost.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the drawings in the embodiments of the present invention.
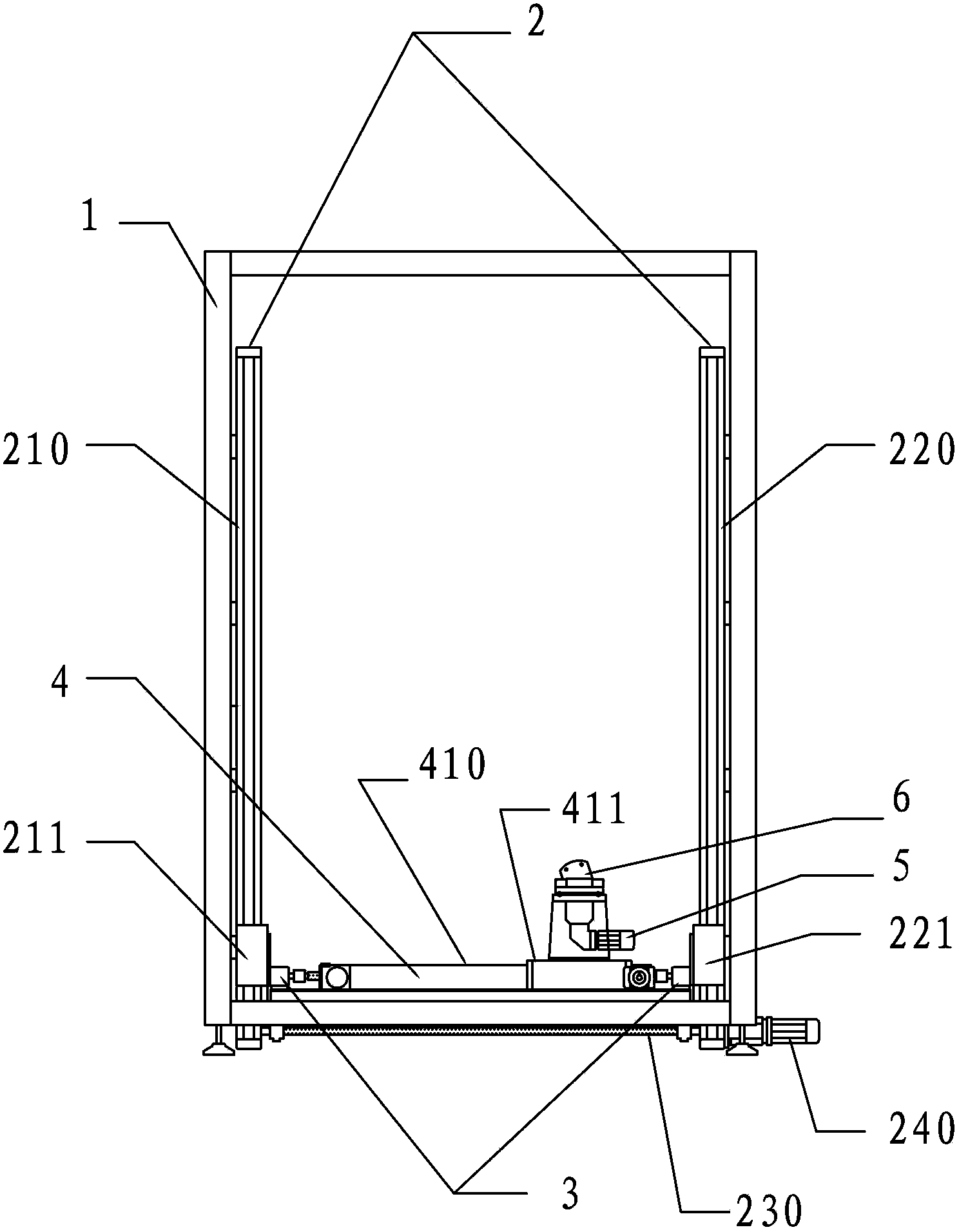
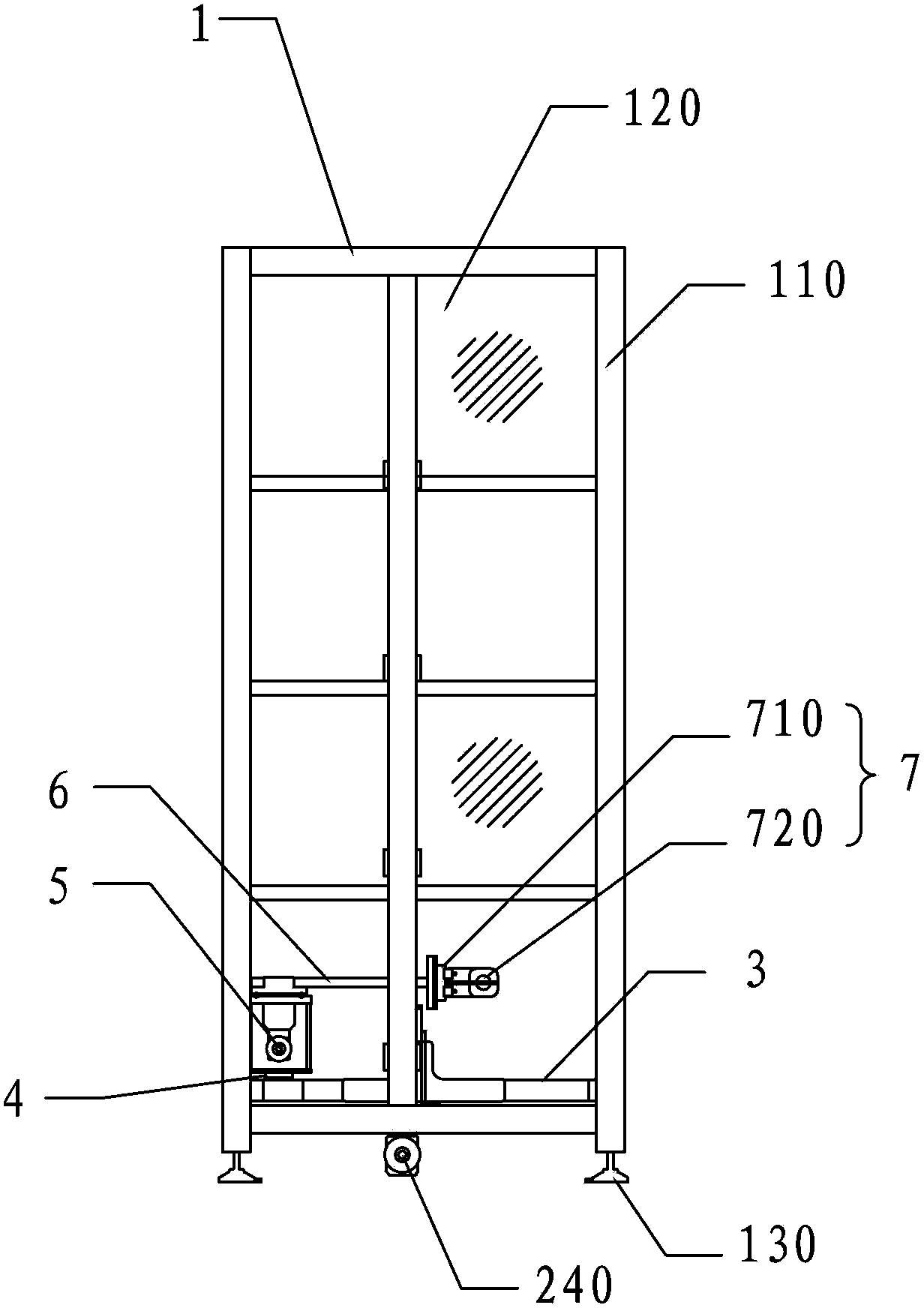
[0022] The invention provides a manipulator gripping machine, please refer to figure 2 , image 3 and Figure 4 , including frame 1, Z-direction linear slide rail group 2, Y-direction linear slide rail group 3, X-direction linear slide rail 4, servo motor four 5, rotating arm 6 and gripper mechanism 7.
[0023] In this embodiment, the frame 1 is in the shape of a "mouth" and is composed of an aluminum alloy frame 110 and an acrylic transparent plate 120 installed in the aluminum alloy frame 110. The bottom of the frame 1 is provided with a foot 130, the foot 130 can be fixed on the ground at the working position to realize the positioning of the frame 1 .
[0024] The Z-direction linear slide rail group 2 includes a first Z-direction rail 210 and a second Z-direction rail ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More