

Series-parallel industrial robot with five degrees of freedom
An industrial robot, industrial robot technology, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve the problems of limited working range, insufficient flexibility, and difficult application fields of parallel robots, and achieve the enhancement of reciprocating work efficiency and load stiffness. The effect of easy control and broad application value
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The accompanying drawings and implementation details of a five-degree-of-freedom hybrid industrial robot of the present invention are as follows:
[0017] The technical scheme of the present invention adopts figure 1 , figure 2 shown for illustration and illustration.
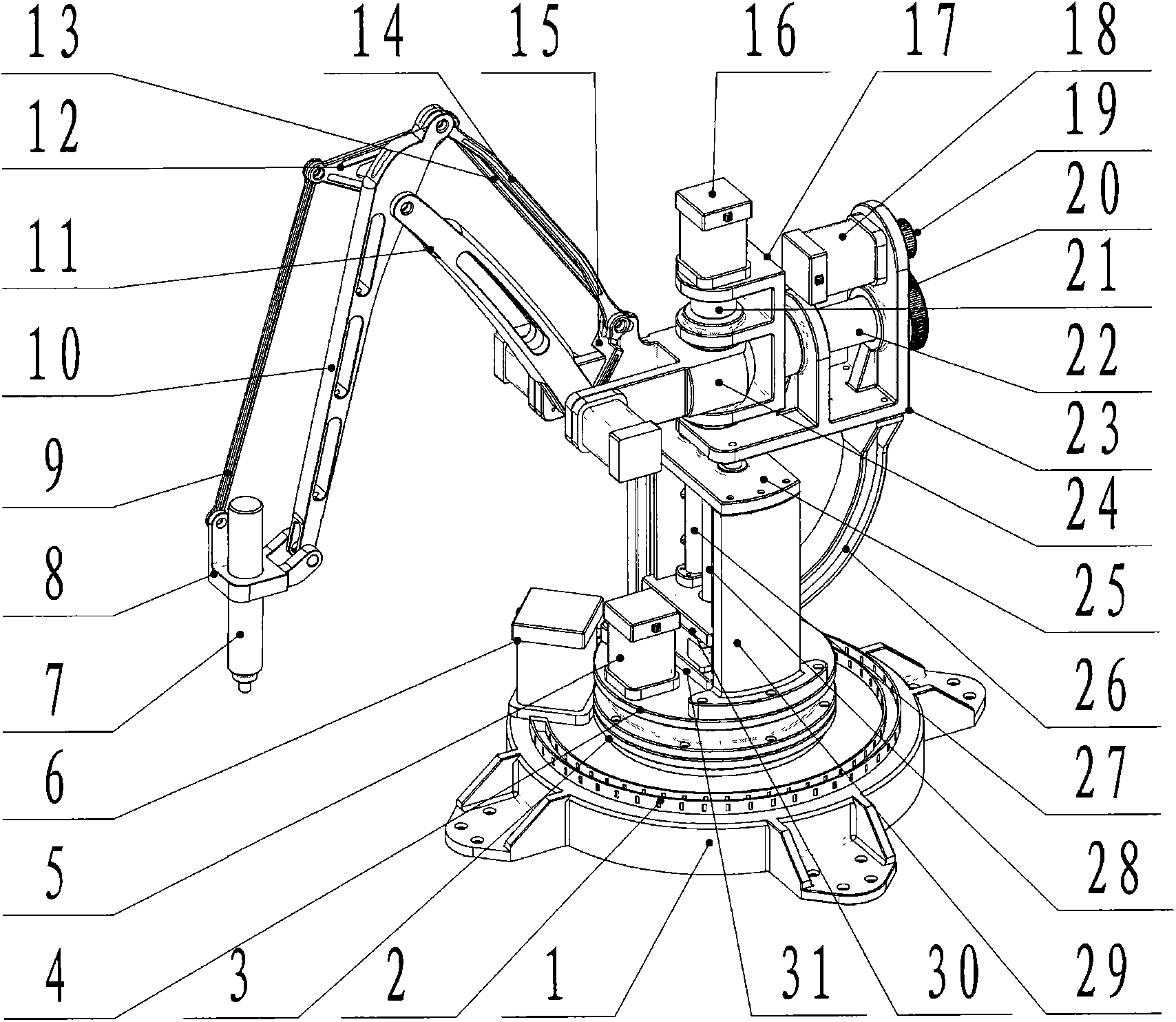
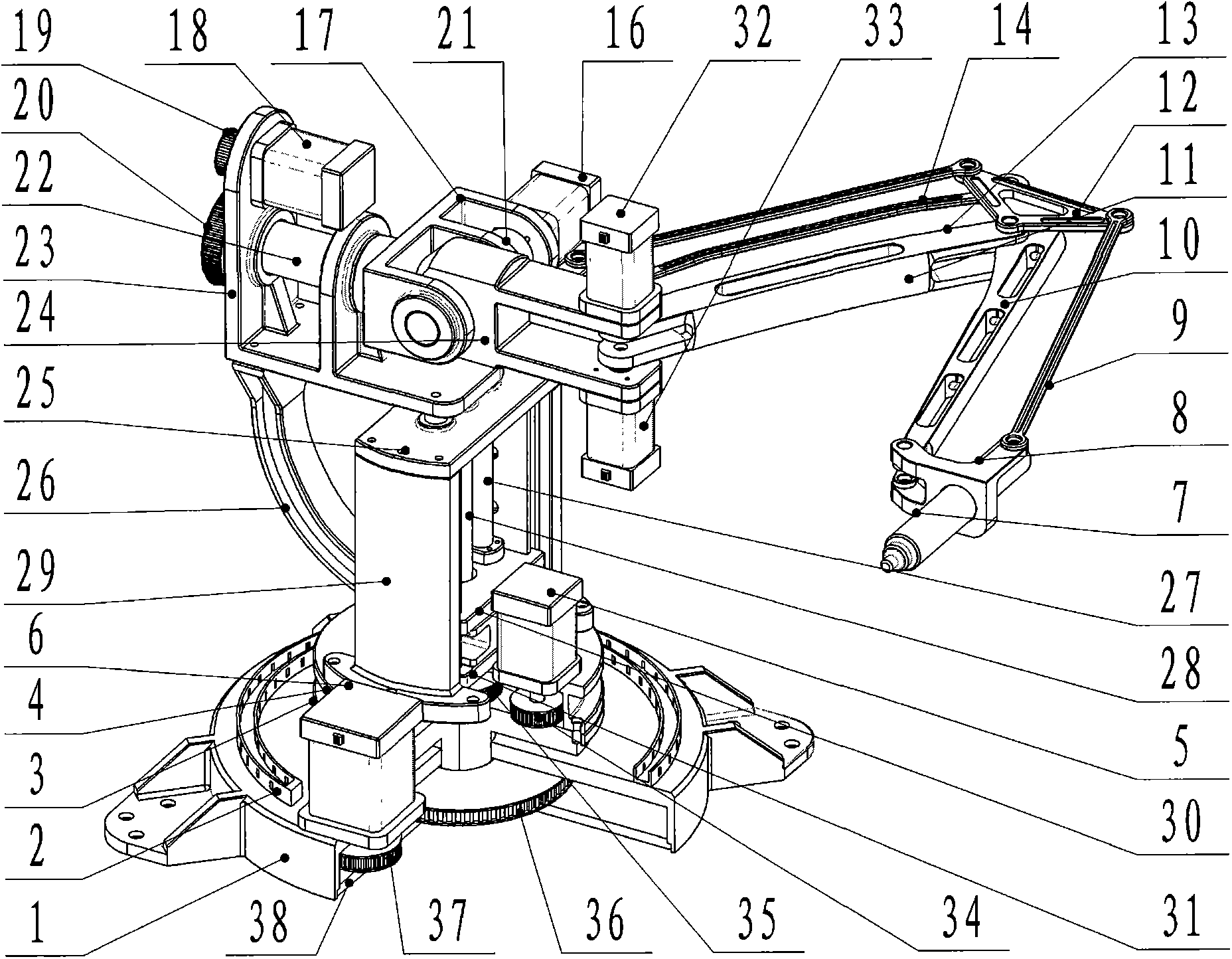
[0018] A five-degree-of-freedom hybrid industrial robot according to the present invention is composed of a vertical rotation joint, a vertical lifting joint, a double rotation degree of freedom wrist joint, a parallel operation mechanism and a terminal quick-change tool. The specific connection of each component The relationship and implementation details are as follows.
[0019]The base 1 is a cylindrical inner hollow round platform with four mounting feet, and the base 1 is fastened to the ground through bolt connection. The wire slot 2 is an arc-shaped slot for moving cables, and the wire slot 2 is fastened to the upper end surface of the base 1 through bolt connection, and the two maintain a con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More