

Motion control system and method of mobile robot in intelligent space
A technology of motion control system and mobile robot, applied in general control system, control/adjustment system, two-dimensional position/channel control, etc. Obtaining learning samples and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0082] The motion control system and method of the mobile robot in the intelligent space of the present invention are described in detail below in conjunction with the accompanying drawings:
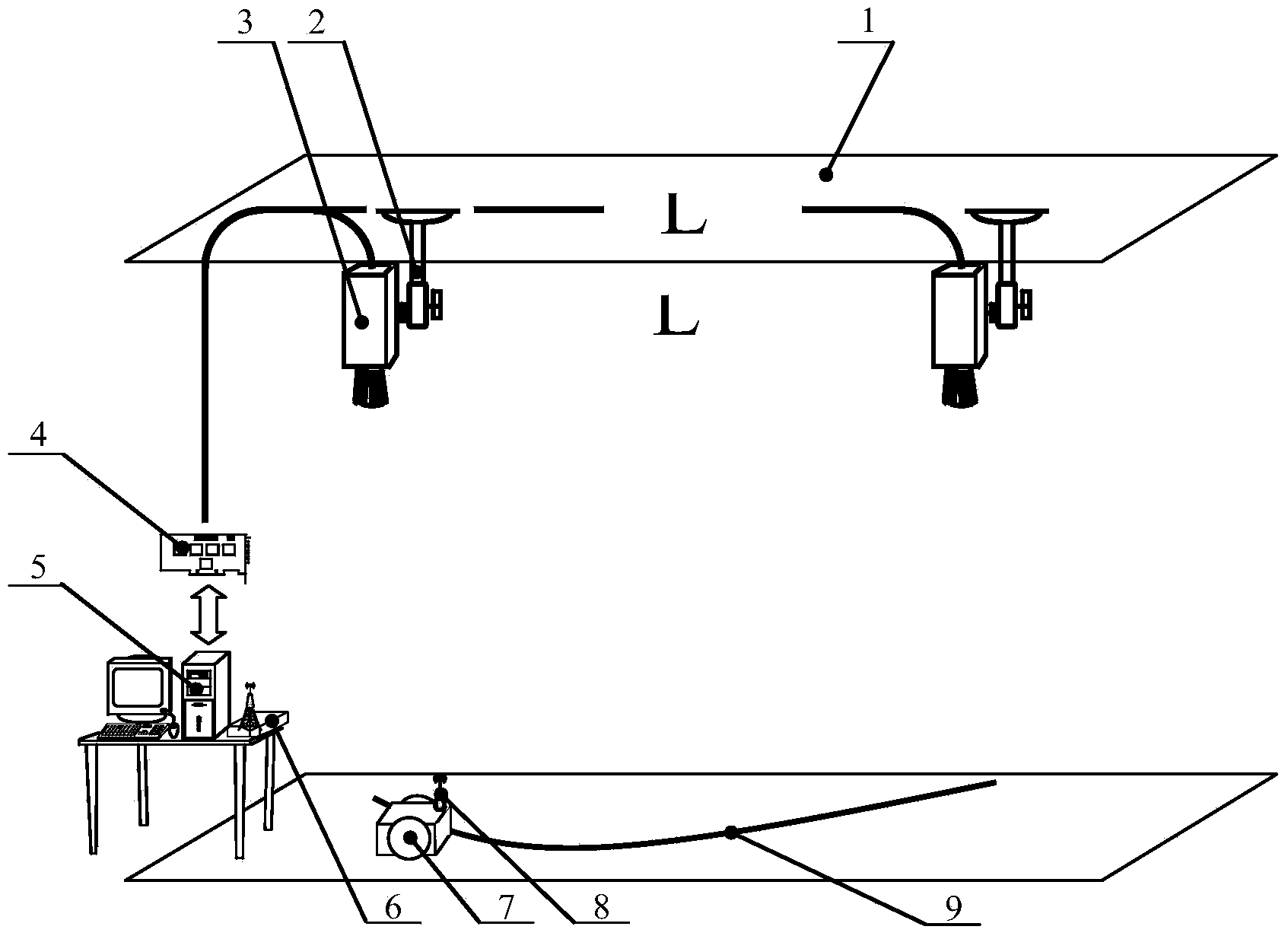
[0083] The motion control system of mobile robot in intelligent space is composed of intelligent space and mobile robot.
[0084] Such as figure 1As shown, the smart space includes a distributed vision system and a wireless sensor network system based on Zigbee technology. The construction of the distributed vision system: the distributed CCD camera 3 is vertically installed on the indoor ceiling 1 through the universal bracket 2, the CCD camera 3 is connected with the multi-channel image acquisition card 4 through the video line, and the image acquisition card 4 is installed on the indoor monitoring host 5 inside the PCI slot. The wireless sensor network system based on Zigbee technology includes blind nodes 8 and Zigbee gateways 6 . The blind node 8 takes the CC2431 chip with a hard...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More