

Chassis mechanism for mobile welding robot
A technology of welding robots and robots, applied in the field of robots, to achieve the effects of simple control, improved driving force and stability, and large adhesion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] In conjunction with the accompanying drawings, the description is as follows:
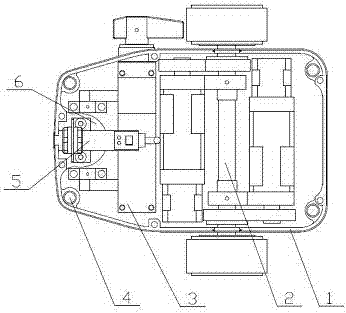
[0030] A mobile welding robot chassis mechanism according to the present invention adopts a wheel differential drive structure, including a body (1), a driving device (2), a guide wheel (6), a permanent magnetic adsorption device (3), and an obstacle avoidance device ( 5) and the anti-drop device (4); the body (1) is the installation basis of all devices.
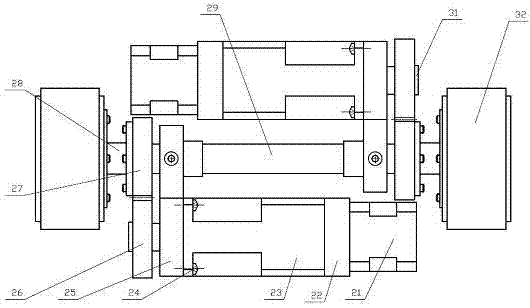
[0031] The drive device (2) includes a drive shaft (29), a drive shaft support (25), a drive motor (21), a reducer (23), a driving gear (26), a driven gear (27) and a drive wheel (21), the two drive shaft supports (25) are installed on the rear of the body (1) through connecting bolts, and the drive shaft (29) is installed between the two drive shaft supports (25) and fixed with screws; the two drive wheels ( 31) Installed on both ends of the drive shaft through the connecting sleeve (28); the drive motor (21) adopts a stepping or servo ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More