

Automatic classifying and identifying method for road line point cloud based on three-dimensional laser reflection strength
A 3D laser and road marking technology, which is applied in character and pattern recognition, photo interpretation, measuring devices, etc., can solve the problems of strict airborne image data acquisition conditions, low work efficiency, and difficult acquisition, and achieve repeated troubleshooting Convenient error detection, less field time, and improved work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
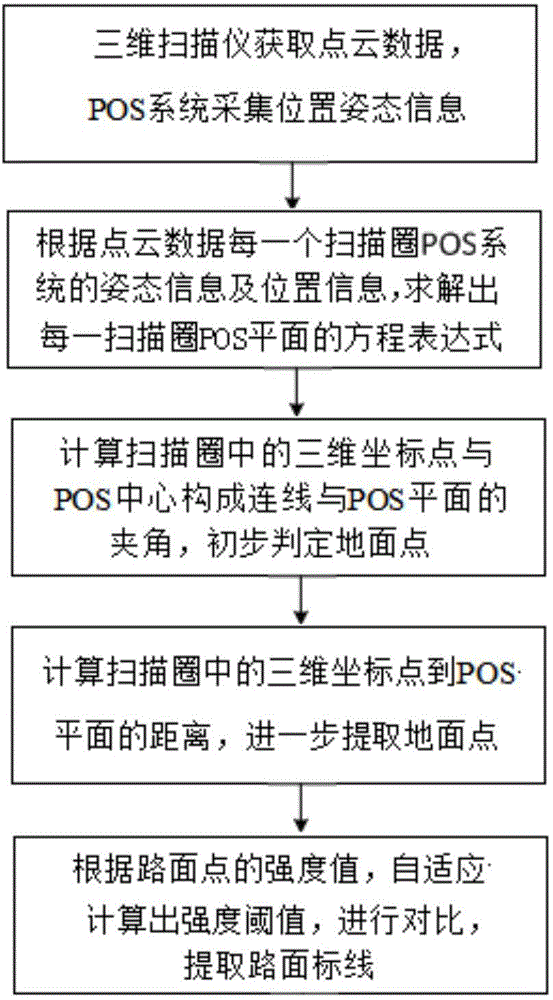
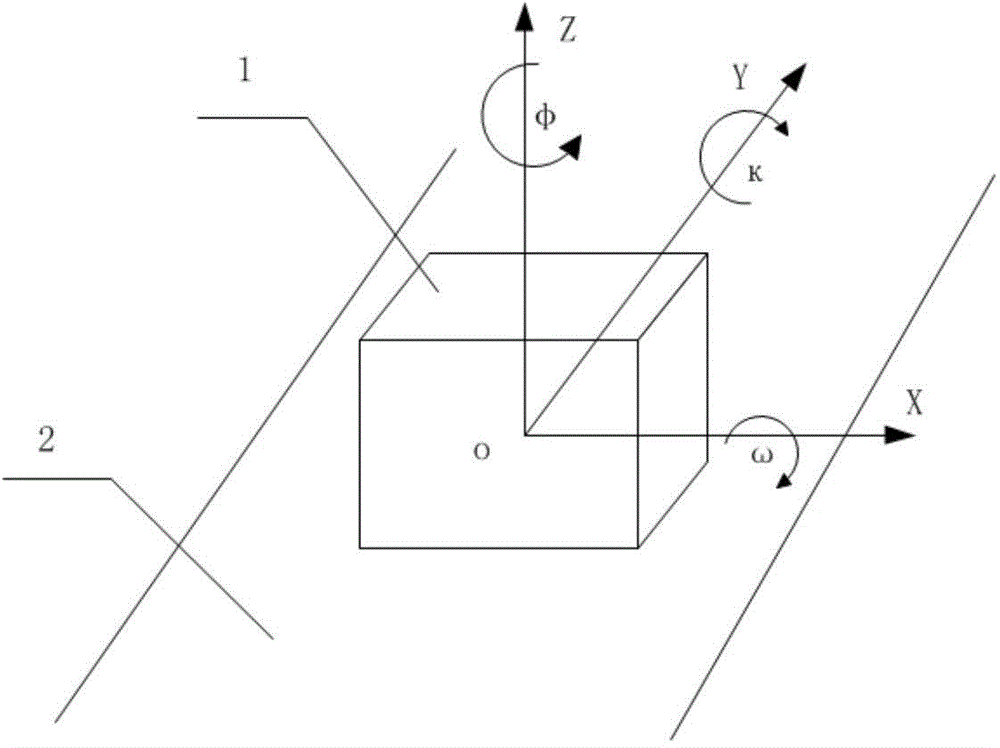
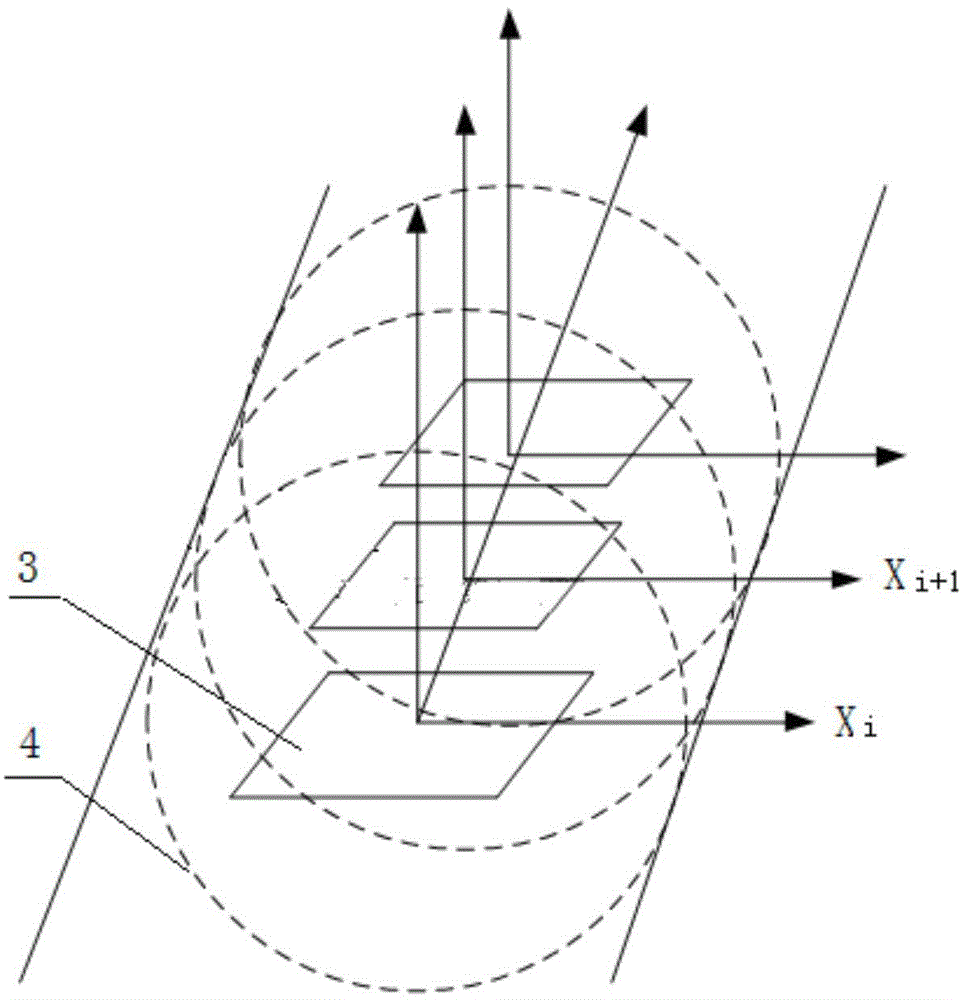
[0029] Embodiment 1: A method for automatic classification and recognition of road marking point clouds based on three-dimensional laser reflection intensity proposed by the present invention, the entire method flow is as follows figure 1 shown. The specific operation is: first, use the vehicle-mounted 3D laser measurement system to collect data. The integrated components of the vehicle-mounted 3D laser mobile measurement system include vehicle 1, 3D laser scanner, GPS navigator, inertial guidance system and panoramic camera. 1 During driving, the 3D laser scanner is used to obtain point cloud data, and the POS system composed of GPS navigator and inertial guidance system is used to obtain attitude and position information; point cloud data is organized according to the circle index to obtain the scanning circle of each circle According to the time alignment, according to the interpolation and settlement of the collected POS information, the posture information and position in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More