

Wall-climbing robot with passive compression structure and biomimetic claws
A technology for wall-climbing robots and compacting structures, which is applied in the field of wall-climbing robots, can solve problems such as multiple drives, complex leg structures, and poor climbing stability, and achieve convenient operation and use, firm gripping, and low cost high effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] In order to make the technical solution and characteristics of the present invention clearer, the present invention will be further described in detail below in conjunction with the embodiments and accompanying drawings. Here, the following examples are used to illustrate the present invention, but not to limit the scope of the present invention.
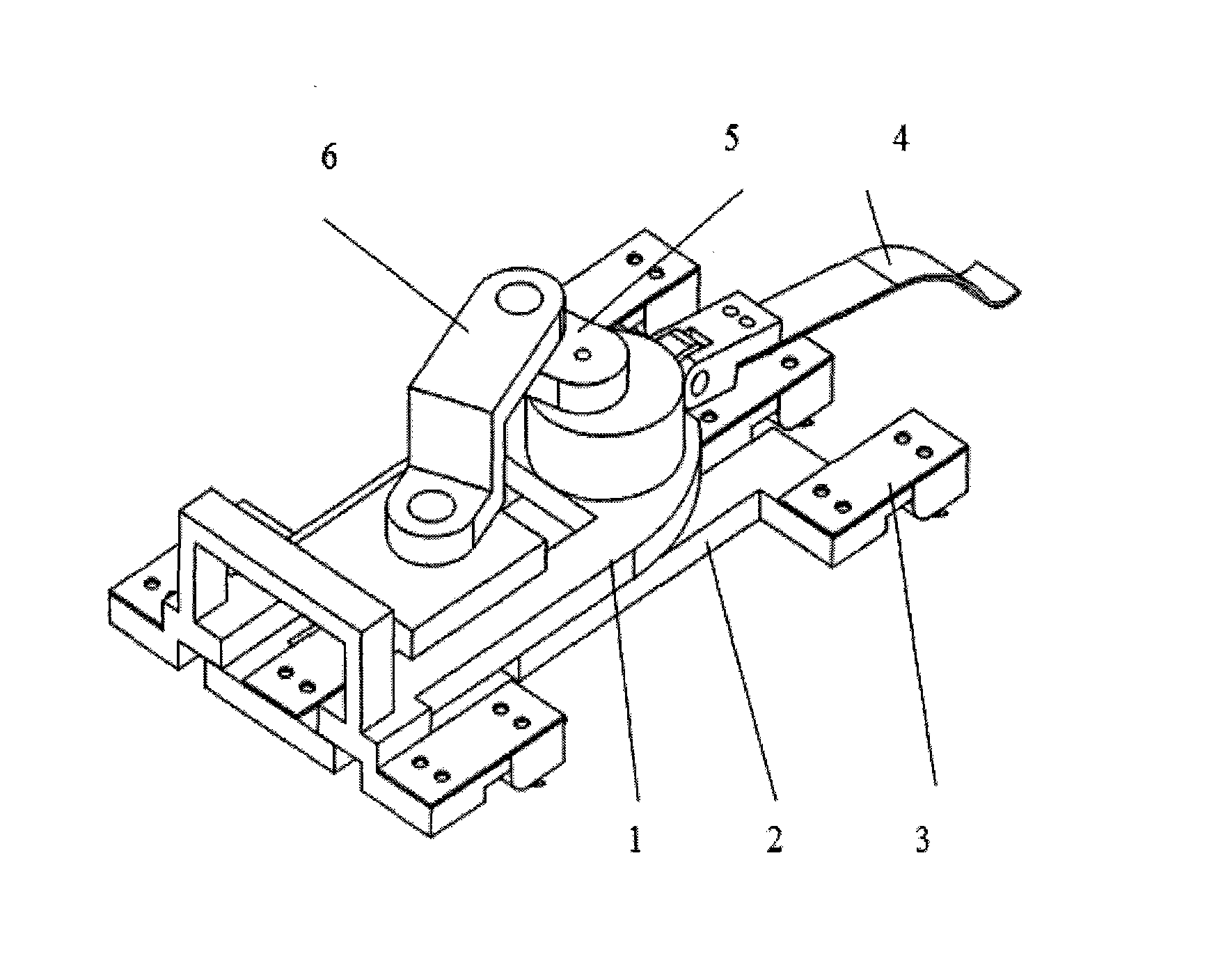
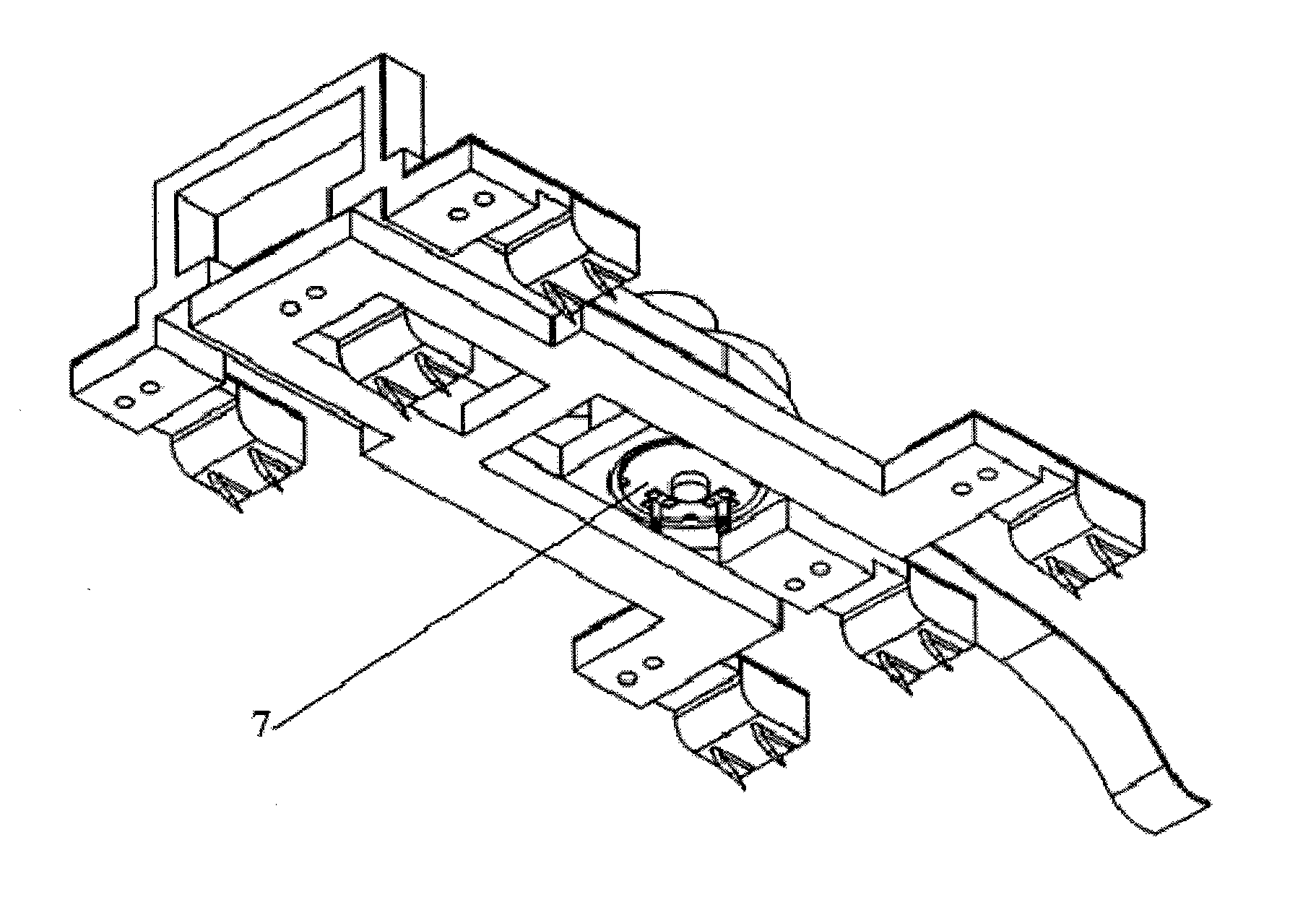
[0015] Such as figure 1 , figure 2 Shown, the present invention comprises the crank 5 of upper body plate 1, lower body plate 2, crank slider, connecting rod 6, claw 3, tail 4. A DC motor 7 is housed on the upper body plate 1, the upper body plate 1 is connected with the lower body plate 2 by a crank slider, the slide block is integrated in the lower body plate 2, and the chute is integrated in the upper body plate 1.
[0016] The output shaft of the DC motor 7 of the present invention is connected with the crank 5 to drive the crank slider to move, so that the upper body plate 1 and the lower body plate 2 are relatively m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More