

Robot gripper for box body stacking and unstacking
A robot hand and robot technology, which is applied in the direction of manipulator, stacking of objects, destacking of objects, etc., can solve the problems of skew, the accurate position and posture of the objects can not be well guaranteed, and the destacking operation cannot be performed. The effect of eliminating the possibility of unboxing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The following describes in detail the embodiment of the robot gripper used for palletizing and depalletizing boxes according to the present invention with reference to the accompanying drawings.
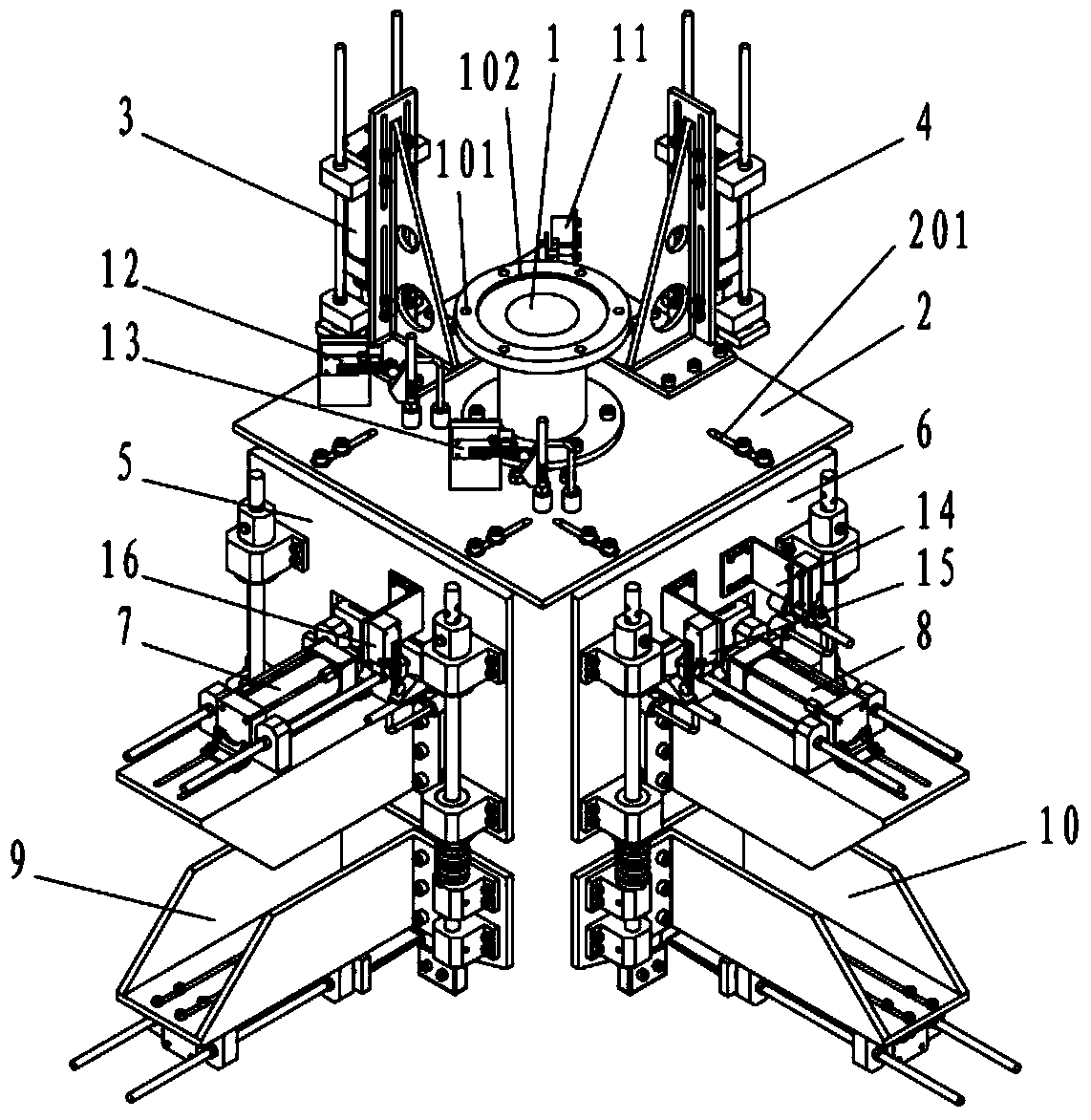
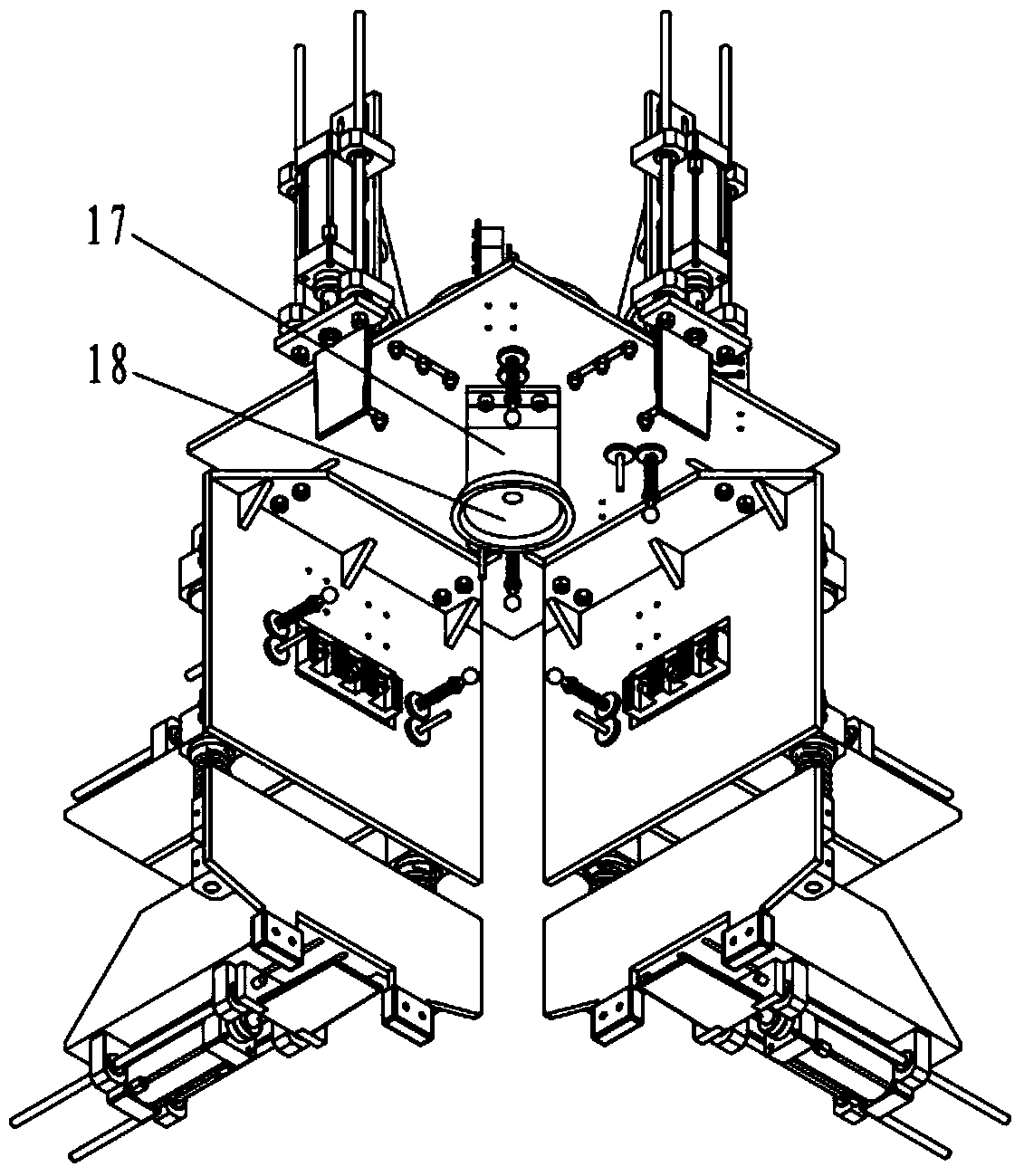
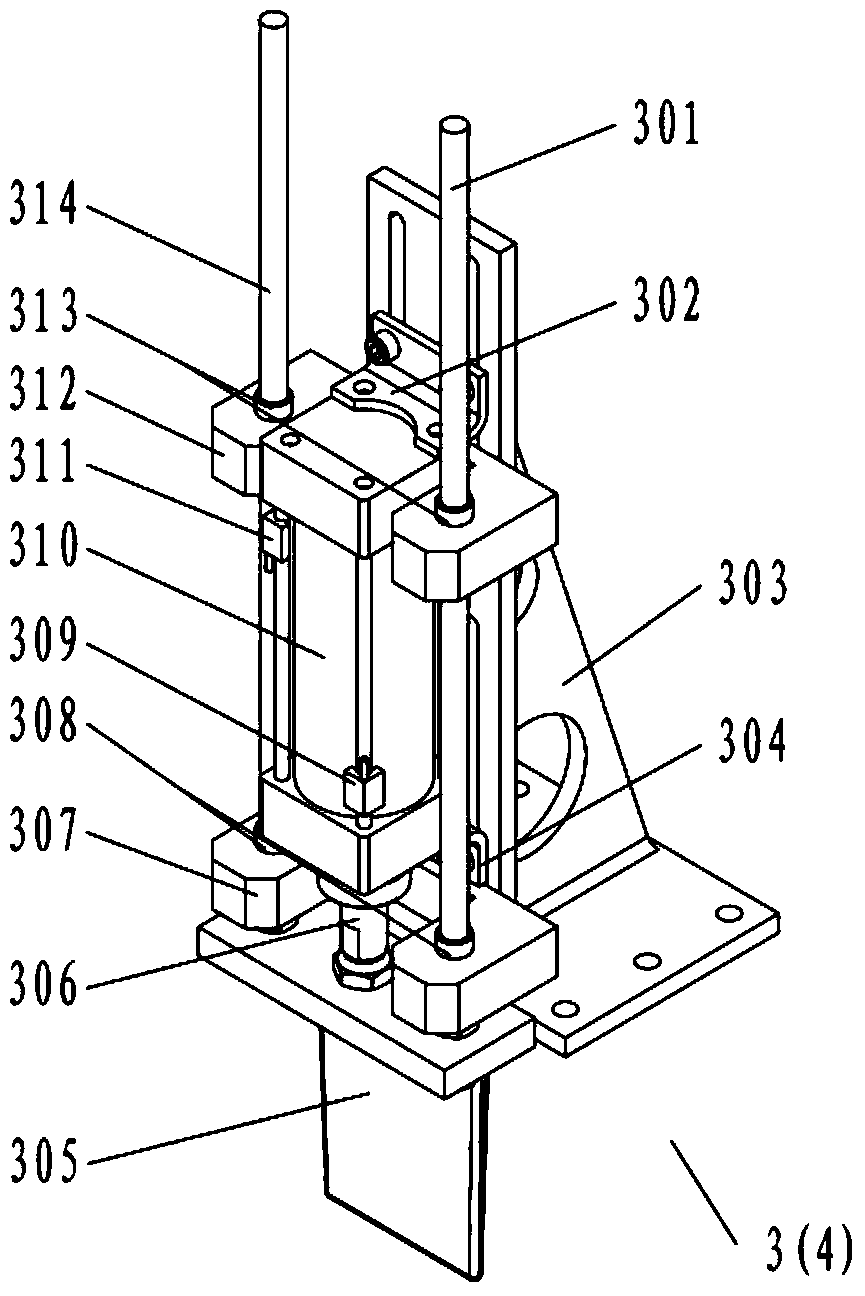
[0030] figure 1 and 2 , according to an embodiment of the present invention, the palletizing-depalletizing robot gripper includes: a flange plate 1, a top plate 2, a pair of insertion devices 3 and 4, a pair of side plate devices 5 and 6, a pair of lateral pressure Tightening devices 7 and 8, a pair of bottom side inserting devices 9 and 10, position sensor assemblies 11 to 16 respectively arranged on the top board and side boards, suction cup mounting bracket 17 and suction cup 18 installed under the top board.
[0031] The flange 1 is the mechanical interface for installing and connecting the palletizing-depalletizing robot's claws and the palletizing robot's wrist, and has notches 102 and bolt holes 101 on it. The top plate 2 is usually square, and is the installation bas...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More