

Redundant actuation chewing robot with bionic temporal-mandibular joint
A chewing robot and temporomandibular joint technology, applied in the field of bionic robots, can solve the problems of reduced stiffness, uncontrollable drive joints, and reduced motion accuracy of parallel mechanisms, so as to improve motion performance, enrich mechanisms, and broaden configuration methods Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
[0045] According to the application field of the chewing robot, select the working mode of the robot control system on the GUI interface of the upper computer control module, and input reasonable control parameters. The upper computer control module sends control instructions to the network programmable controller through the serial port communication module. The network programmable controller performs logic processing on the control instructions and sends high-speed pulses to the servo controller, and the servo controller controls the servo motor. The networked programmable controller reads the chewing force and position information of the robot collected by the sensing module, and feeds back to the host computer control module for adjusting the control instructions.
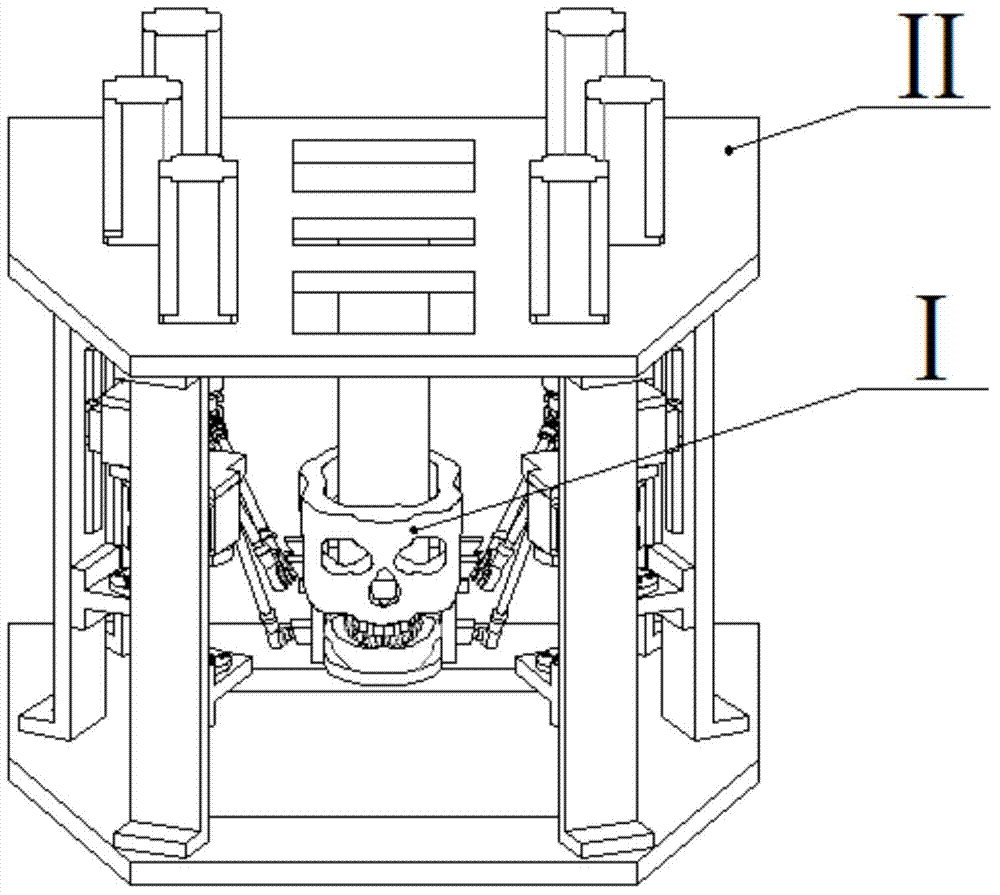
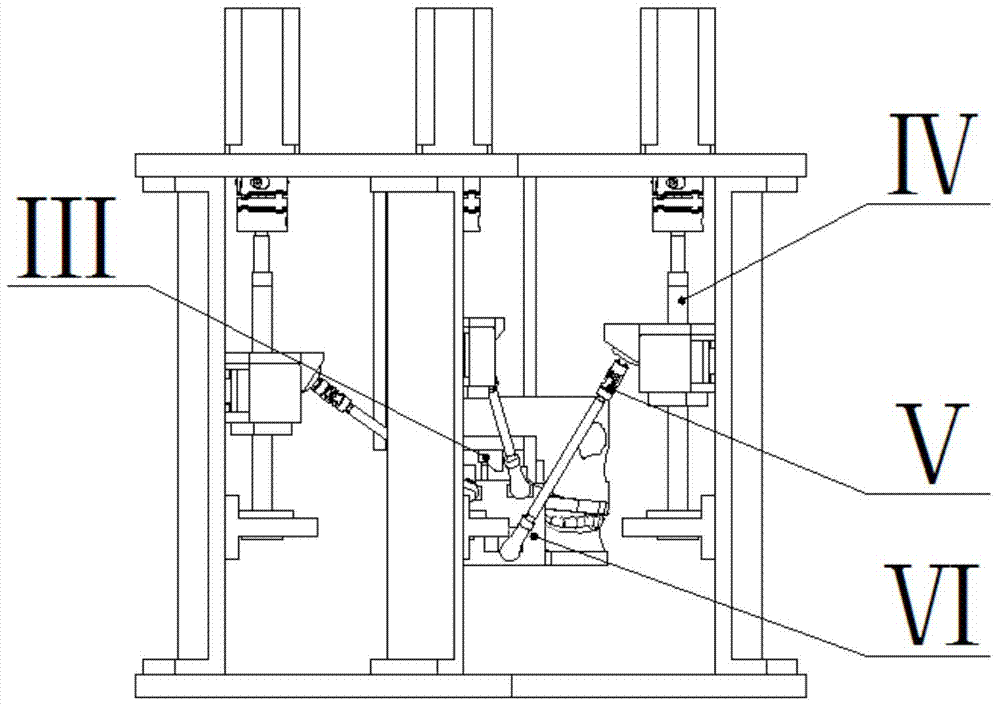
[0046] Overall operation process of the present invention
[0047] The redundantly driven chewing robot with bionic temporomandibular joints of the present invention can be applied to medical teaching, food ev...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More