

Optimum navigational parameter fusion method based on three-level filtering under redundant sensor configuration
A technology of navigation parameters and three-stage filtering, which is applied in navigation calculation tools, navigation through speed/acceleration measurement, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] The technical scheme of the present invention is described in detail below in conjunction with accompanying drawing:
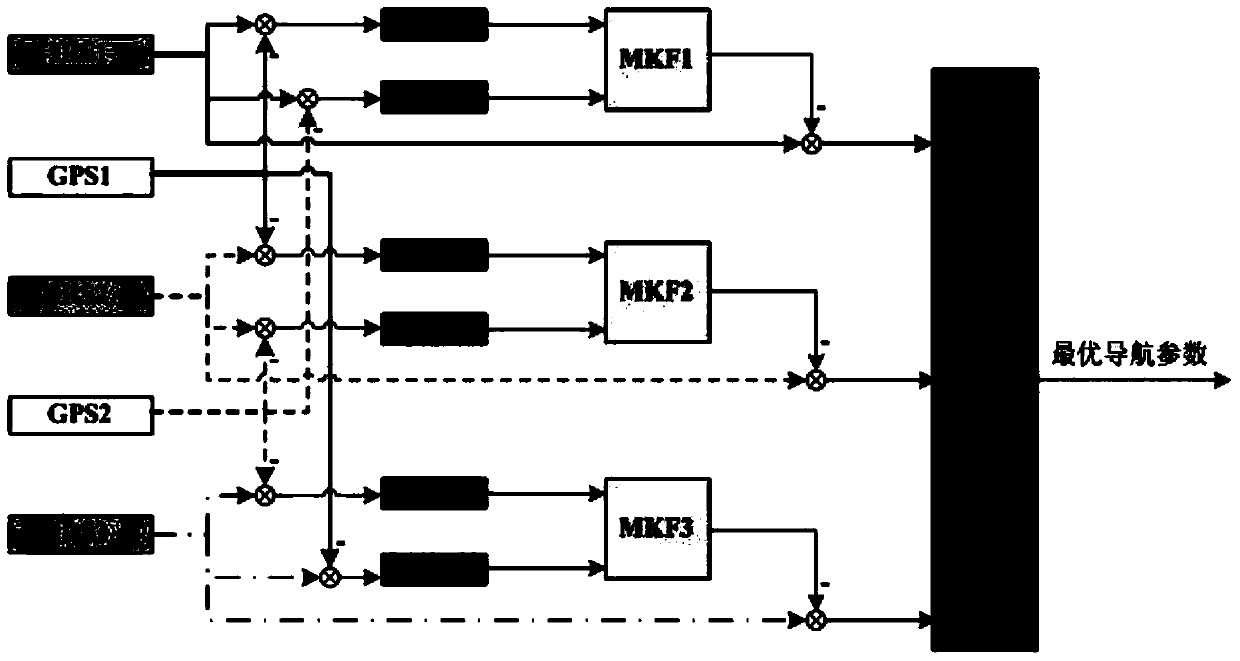
[0052] The method of the invention makes full use of the redundant inertial navigation system and the data output by the GPS system, and realizes the optimal estimation of the attitude, speed and position of the flight management system through three-stage filtering. Specifically include the following steps:
[0053] (1) Data collection steps:
[0054] (a) Read the three attitude angles, three positions, three velocity information, three angular velocity information and three linear acceleration information output by the i-th inertial navigation system IRSi with a cycle ΔT, and the three attitude angle information are pitch Angle θ, roll angle φ, and yaw angle ψ; the three position information are longitude L, latitude λ, and height h; the three velocity information are eastward velocity v in the geographic coordinate system E , Northward velocity v ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More