

Automatic speed adjustment type cable robot
A self-speed-adjusting, robotic technology, applied in bridge parts, bridges, buildings, etc., can solve the problems of difficulty in automatic adjustment of the speed when energy is returned, high consumption of robots, and difficulty in returning to the ground automatically, so as to prevent cable piercing accidents and save energy Energy, damage avoidance effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
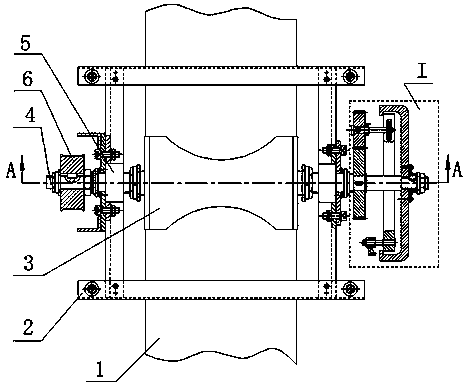
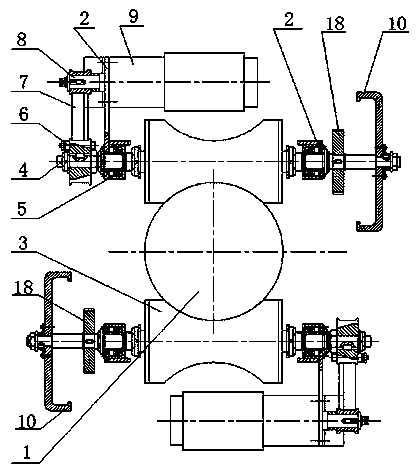
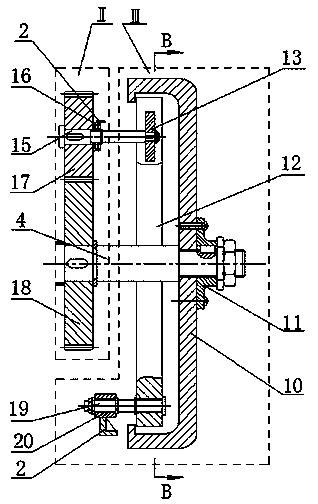
[0030] Such as figure 1 , figure 2 , image 3 , Figure 4 As shown, the self-adjusting cable robot includes a frame 2, a roller 3, a main shaft 4, a rolling bearing A5, a synchronous pulley A6, a synchronous belt 7, a synchronous pulley B8, and a synchronous motor 9. The frame 2 is provided with a rolling bearing A5, Synchronous motor 9, the main shaft 4 is assembled in the rolling bearing A5, one end of the main shaft 4 is connected with the synchronous pulley A6, the roller 3 is assembled on the main shaft 4, the arc surface of the roller 3 is pressed on the surface of the cable 1, and the synchronous pulley B8 is assembled on the synchronous motor 9 On the main shaft, the synchronous pulley A6 and the synchronous pulley B8 are both meshed with the synchronous belt 7; the self-adjusting speed cable robot also includes the return mechanism I, and the return mechanism I is braked by the speed increase mechanism II and the inner expansion block. Institution Ⅲ constitutes. ...
Embodiment 2
[0035] Such as figure 1 , figure 2 , image 3 , Figure 4 As shown, the self-adjusting cable robot includes a frame 2, a roller 3, a main shaft 4, a rolling bearing A5, a synchronous pulley A6, a synchronous belt 7, a synchronous pulley B8, and a synchronous motor 9. The frame 2 is provided with a rolling bearing A5, Synchronous motor 9, the main shaft 4 is assembled in the rolling bearing A5, one end of the main shaft 4 is connected with the synchronous pulley A6, the roller 3 is assembled on the main shaft 4, the arc surface of the roller 3 is pressed on the surface of the cable 1, and the synchronous pulley B8 is assembled on the synchronous motor 9 On the main shaft, the synchronous pulley A6 and the synchronous pulley B8 are both meshed with the synchronous belt 7; the self-adjusting speed cable robot also includes the return mechanism I, and the return mechanism I is braked by the speed increase mechanism II and the inner expansion block. Institution Ⅲ constitutes. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More