

Method of Realizing Tool Nose Follow Machining in Four-Axis Horizontal Machining Center
A machining center, horizontal technology, used in metal processing, metal processing equipment, metal processing machinery parts, etc., can solve problems such as increased cost, complex processing and programming, and easy deformation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The present invention will be described in further detail below in conjunction with the embodiments of the drawings.
[0015] Taking Siemens 840D four-axis horizontal machining center as an example, using the method of the present invention to perform tool tip following machining on a workpiece, the specific steps are:
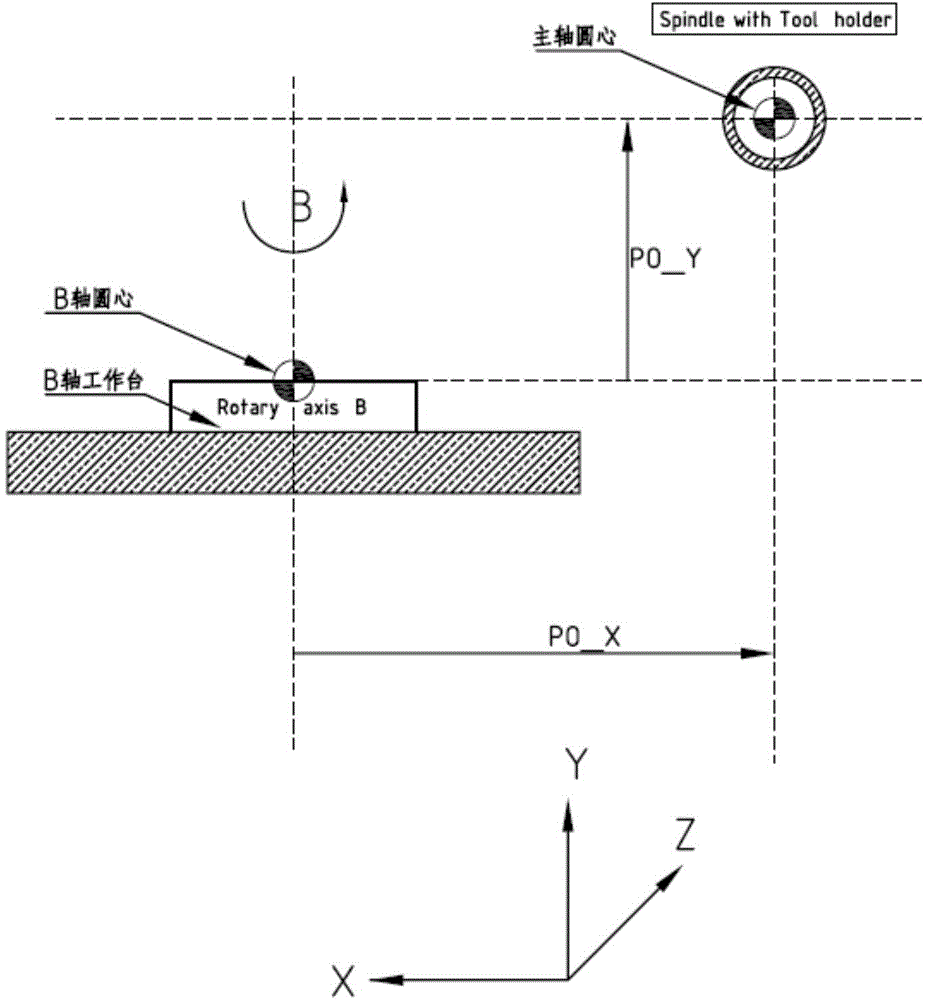
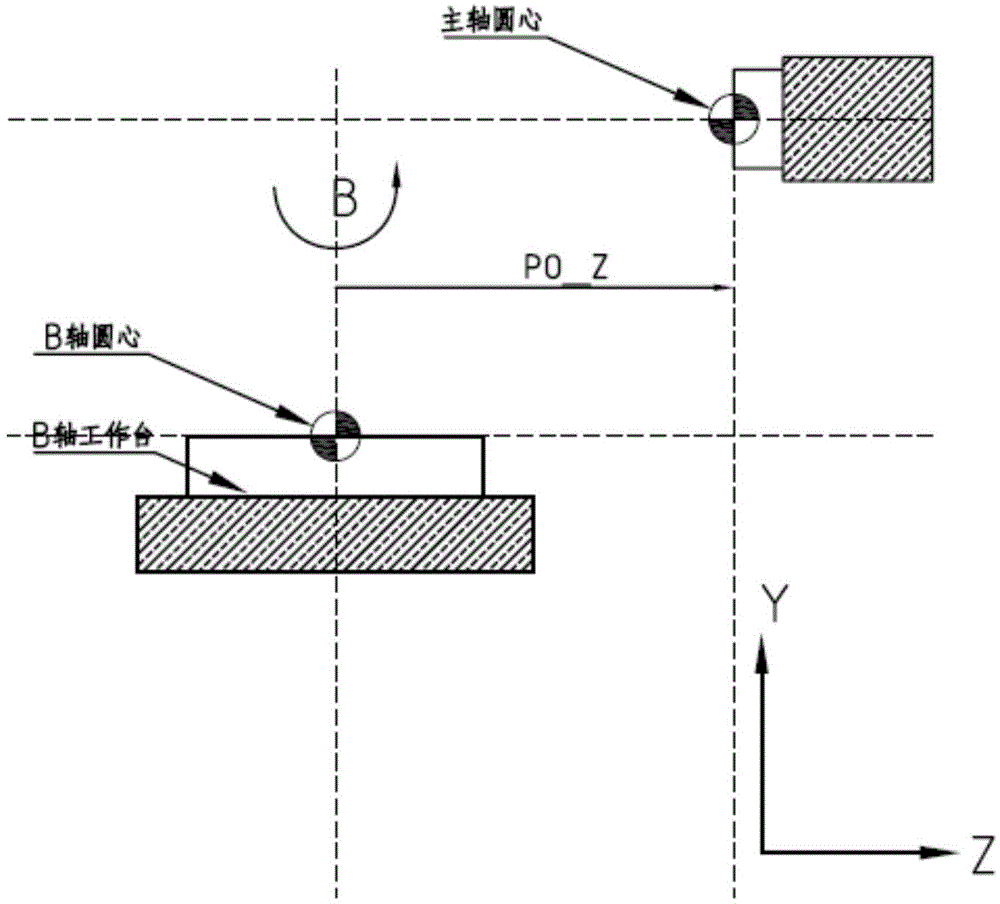
[0016] 1) Set the X-axis position sensor on the X-axis of the Siemens 840D machine tool, set the Y-axis position sensor on the Y-axis of the machine tool, set the Z-axis position sensor on the Z-axis of the machine tool, and set the B-axis position sensor on the B-axis of the machine tool. X-axis position sensor, Y-axis position sensor, Z-axis position sensor and B-axis position sensor are respectively connected to 8051 series single-chip microcomputers through signal transmission cables; then 8051 series single-chip microcomputers are connected to NC controller through data transmission cables;
[0017] 2) Place a cylindrical workpiece vertically at any posit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More