

Filtering method for gyroscopic drift under collaborative navigation condition of multiple unmanned surface vehicles
A technology of gyro drift and cooperative navigation, applied in navigation computing tools and other directions, can solve the problems of low precision of MEMS gyroscope, only three-dimensional filtering state, difficulty in estimating initial heading deviation and gyro drift at the same time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0036] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
[0037] The application principle of the present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
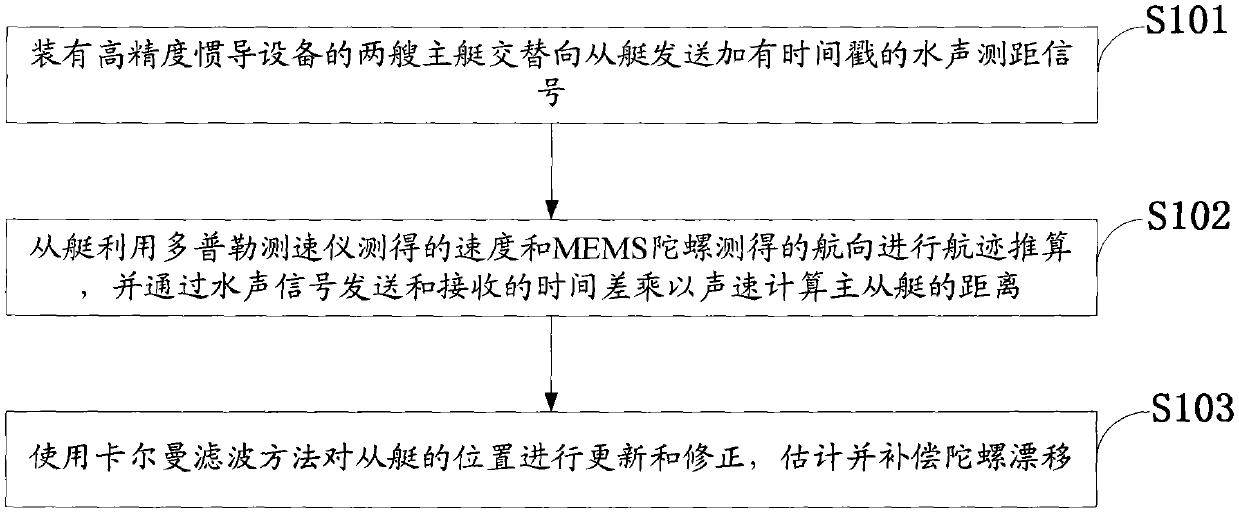
[0038] Such as figure 1 As shown, the filtering method for gyro drift under the condition of multi-unmanned boat cooperative navigation in the embodiment of the present invention includes the following steps:
[0039] S101: The two master boats equipped with high-precision inertial navigation equipment alternately send underwater acoustic ranging signals with time stamps to the slave boats;
[0040] S102: The slave boat uses the speed measured by the Doppler ve...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More