

Flux linkage error observation-based acquisition method of full-order flux linkage observer of asynchronous motor without speed sensor
A technology without a speed sensor and a flux observer, which is applied in the direction of controlling generators, motor generators, and electromechanical brakes. It can solve the problems of large motor parameter errors, poor system operation stability, and full-order flux observer observation The problem of low accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
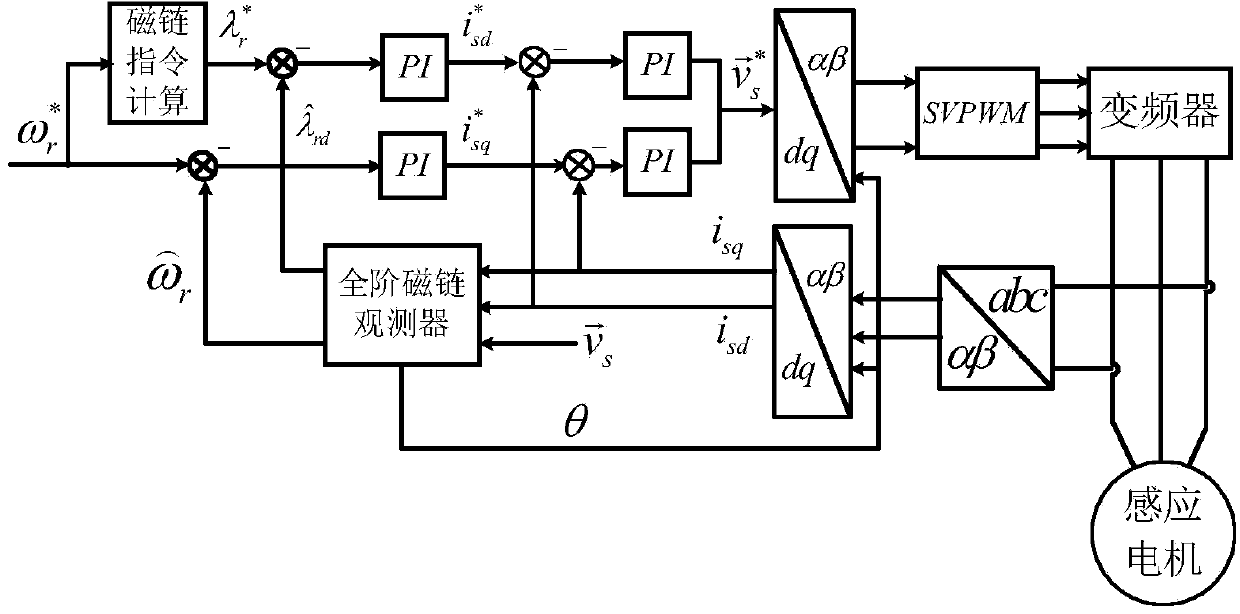
[0102] Specific implementation mode one: see figure 2 Describe this embodiment, the acquisition method of the full-order flux observer of the asynchronous motor without speed sensor based on the observation of flux linkage error described in this embodiment, this method is realized based on the existing full-order flux observer, the The method includes the following steps,
[0103] Step 1. When the following 3 conditions are met, obtain 4 error feedback coefficients, and the 4 error feedback coefficients are g 1 , g 2 , g 3 and g 4 , Substituting the obtained 4 error feedback coefficients into
[0104] G = g 1 - g 2 g 3 ...
specific Embodiment approach 2
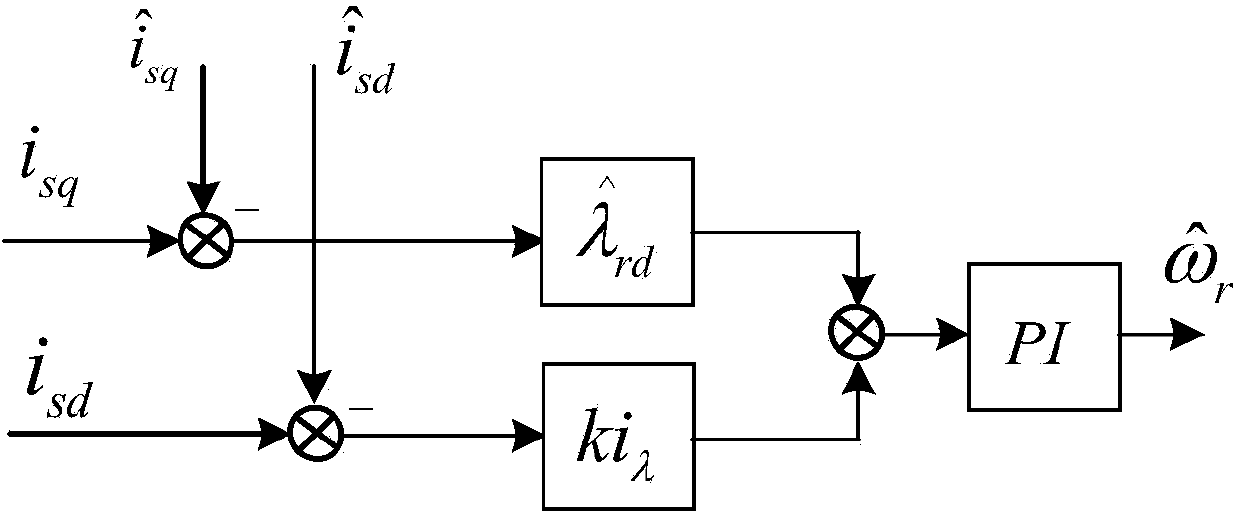
[0138] Specific implementation mode two: see figure 1 Describe this embodiment. The difference between this embodiment and the acquisition method of a full-order flux observer without a speed sensor for an asynchronous motor based on the observed flux error in the first embodiment is that in the second step, according to the Know the rotational speed adaptive law equation:
[0139] ω ^ r = k 1 ( e iα λ ^ rβ - e iβ λ ^ rα ) - k 2 ( e λα λ ^ ...
specific Embodiment approach 3
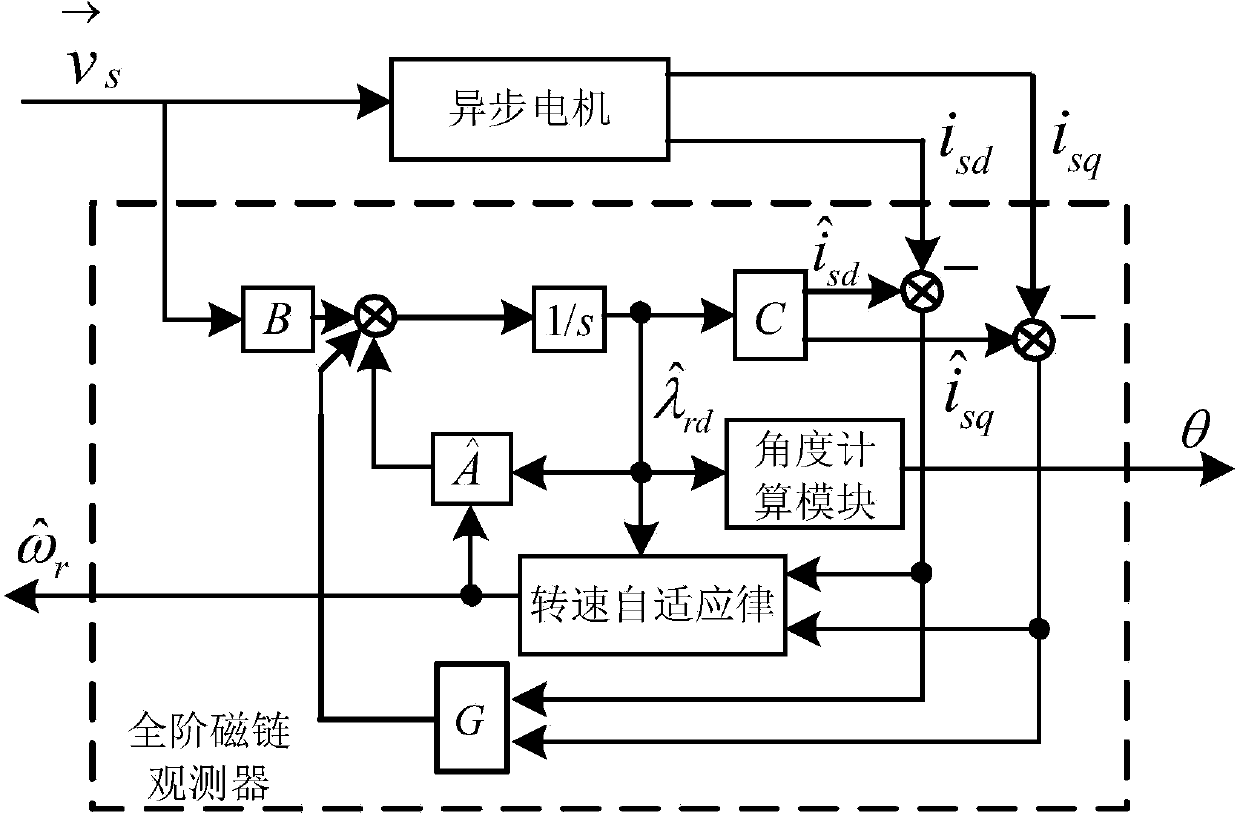
[0168] Specific implementation mode three: see image 3 This embodiment is described. The difference between this embodiment and the acquisition method of a full-order flux observer for an asynchronous motor without a speed sensor based on the observed flux error described in the first embodiment is that the above-mentioned existing full-order flux The chain observer includes Α, B, C, G, 1 / s, speed adaptive rate, angle calculation module, an adder and two subtractors, the described A represents the full-order flux linkage observation matrix, and B represents the voltage input Matrix, C represents the current output matrix, 1 / s represents the integral operation,
[0169] The adder is used to sum the output voltage signal of B, the observation signal of A output and the error compensation signal of G output to obtain the rotor flux linkage differential signal,
[0170] 1 / s is used to perform an integral operation on the differential signal of the rotor flux linkage output by the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More