

Method for realizing S curve acceleration and deceleration of motion control system
A technology of motion control system and implementation method, applied in the direction of digital control, electrical program control, etc., can solve the problems of large amount of calculation and influence, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0172] Below in conjunction with accompanying drawing and specific embodiment the technical scheme is further described as follows:
[0173] 1. Motion analysis of S-curve acceleration and deceleration process
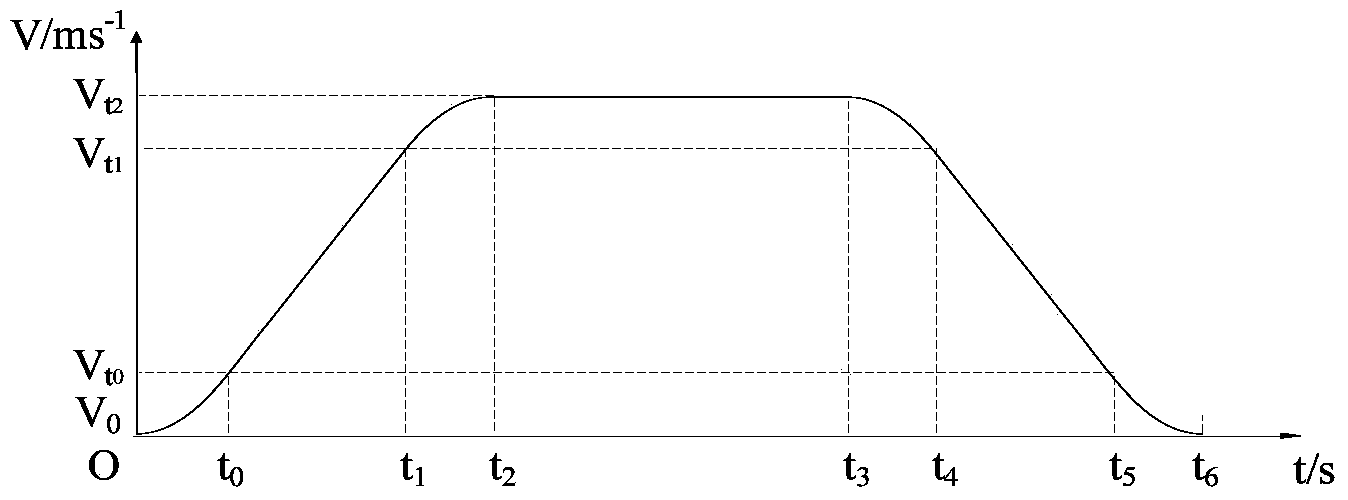
[0174] In the process of motion control, a stable, smooth, and uniform S-shaped velocity curve requires that the velocity-time curve of the motion segment be continuous and guideable everywhere; at the same time, it is required that the jerk, acceleration, and speed change curves of the motion segment satisfy strict integrals with each other relation.
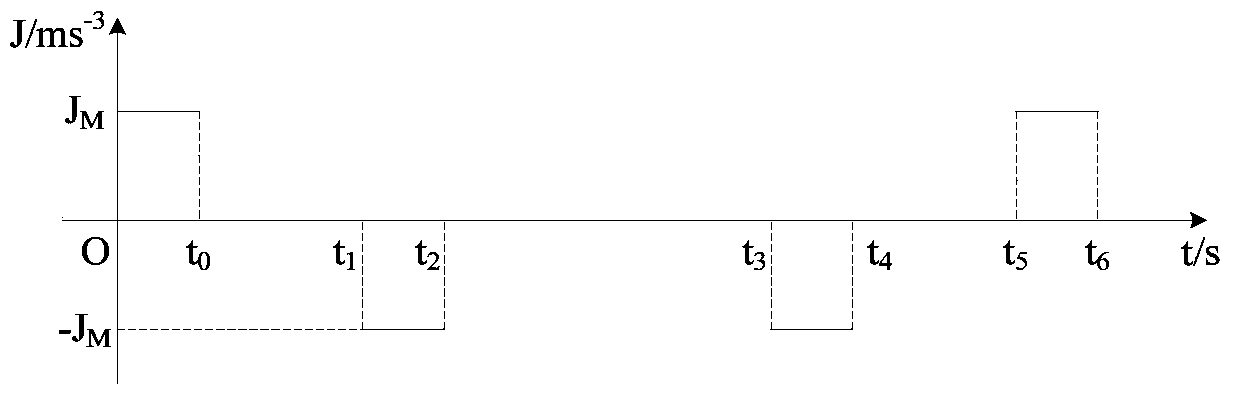
[0175] 1) Jerk curve
[0176] The jerk curve of S-curve acceleration and deceleration is a segmented curve that depends on the motion time, assuming that the jerk is J M , the jerk curve of the acceleration and deceleration process is as follows figure 1 shown.
[0177] Assume that the current time t, the end point of the jerk segment t 0 , end point of uniform acceleration segment t 1 , End point of deceleration a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More