

One-leg continuous jumping robot with adjustable attitude in the air
A robot and single-leg technology, applied in the field of continuous jumping robot with adjustable single leg in the air, can solve the problems of no attitude adjustment, complex mechanism, and inability to take off continuously, and achieve fast response, strong controllability, and controllable initial speed of take-off control effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The technical solutions of the present invention will be further described below with reference to the embodiments shown in the accompanying drawings.
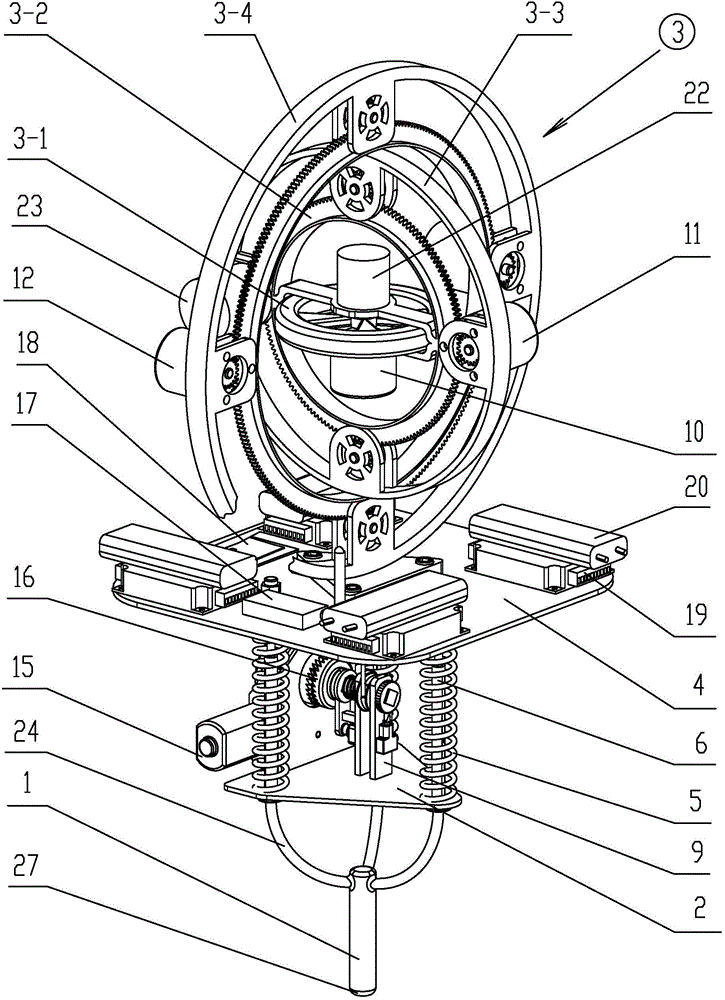
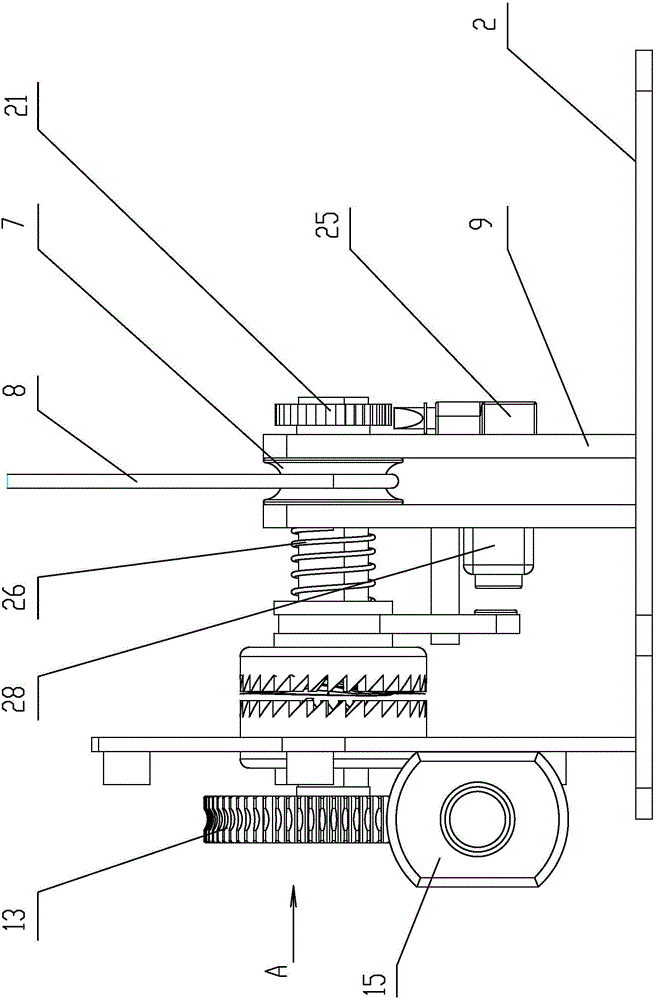
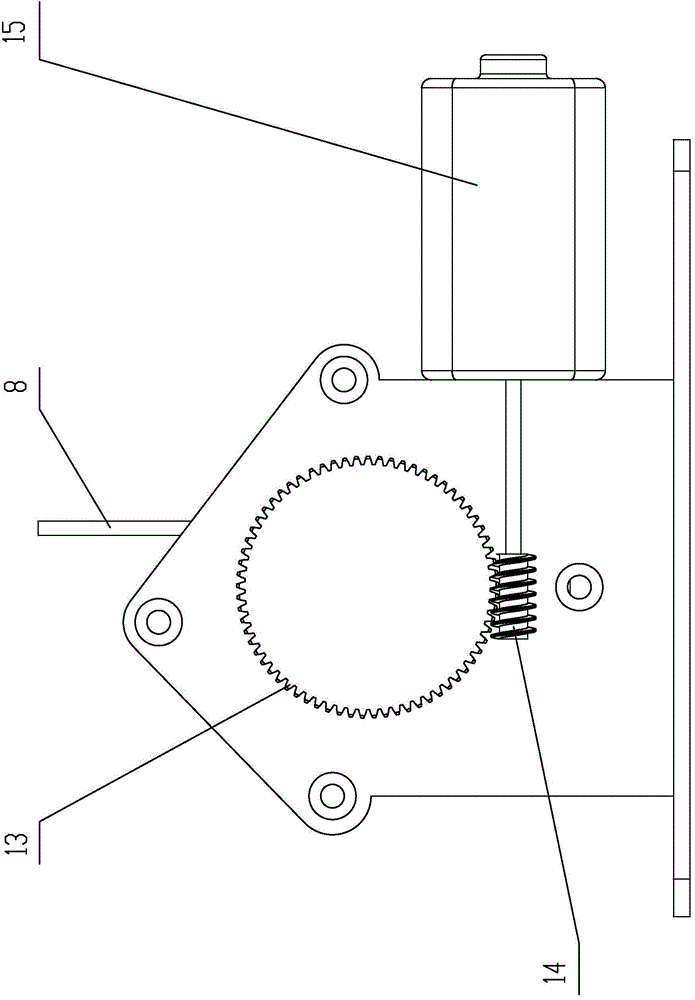
[0018] The single-leg continuous jumping robot with adjustable aerial attitude of the present invention includes an upper body, a waist and legs, and the upper body includes a three-axis gyroscope 3 (as a stabilization system) and a detection control system, and the detection control system includes a motion controller 18 , a servo driver 19, a wireless module 17, an attitude measurement sensor and a battery pack 20, the waist includes an upper substrate 4 and a lower substrate 2 and an elastic element, the elastic element is evenly supported between the upper substrate 4 and the lower substrate 2, Each elastic element is an assembly of a compression spring 5 and a piston rod 6, the leg is a single leg 1, and a pressure sensor 27 is arranged at the bottom of the single leg 1; the three-axis gyroscope 3 and the detection ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More