

Pneumatic multidirectional bending flexible joint
A flexible joint and bending technology, used in manipulators, manufacturing tools, joints, etc., can solve the problems of limited joint flexibility, difficulty in miniaturization, poor flexibility, etc., and achieve stable movements, good adaptability, and flexible movements.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0020] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific examples.
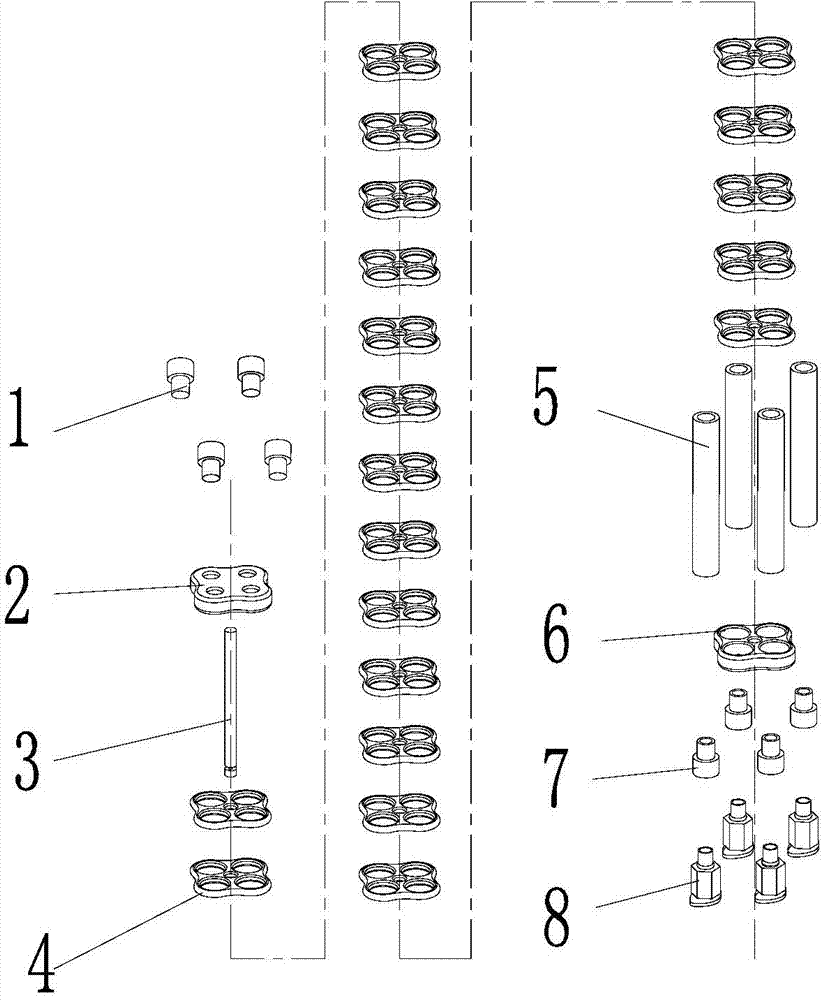
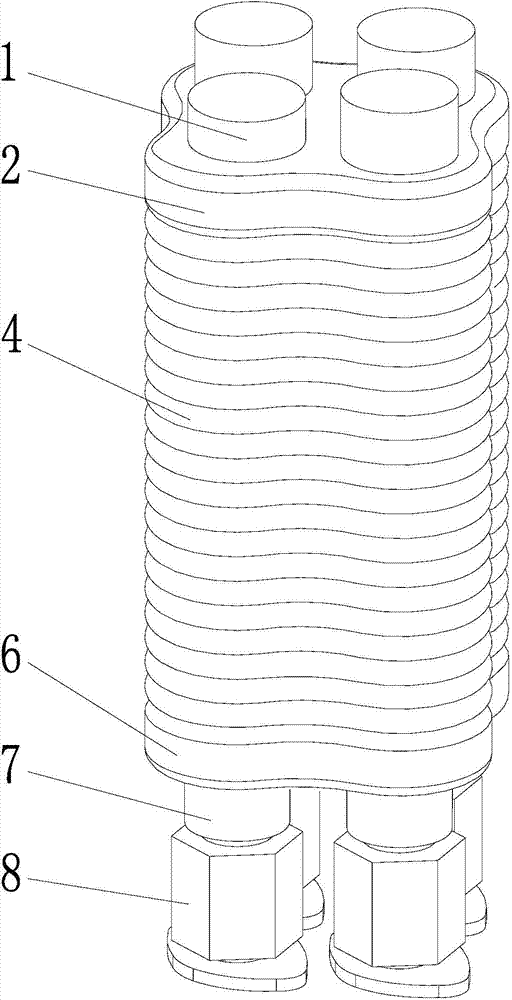
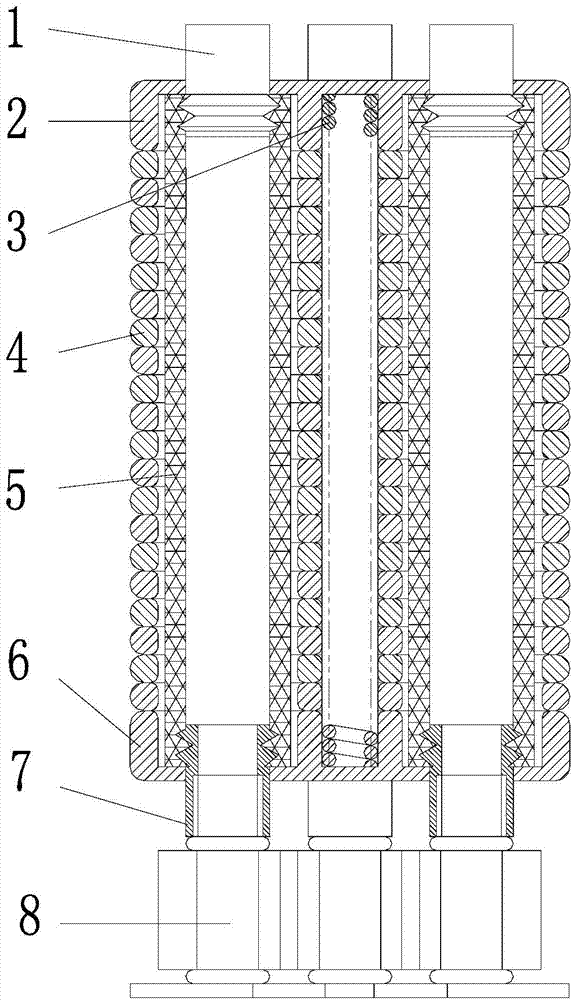
[0021] The pneumatic multidirectional flexible joint of the present invention is composed of an upper end cover 1, an upper end cover 2, a joint skeleton 3, a constraint element 4, an air bag 5, a lower end cover 6, a lower end cover 7 and a fluid inlet 8; the upper end cover 1 and the lower end cover 6 are respectively located at both ends of the pneumatic multi-directional flexible joint. In the middle of the pneumatic multi-directional flexible joint are 20 constraining elements 4 coaxial close-packed and connected in series. The axis of a tubular cavity in the two tubular cavities coincides with the axis of the columnar structure, which is called tubular cavity one, and the joint skeleton 3 (attached) is arranged in the tubular cavity one image 3 Examples of flexible shaft skeletons, with Figure 4 Axially telescopic sleeve skeleto...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More