

Interference object detection method and equipment
A technique for interfering with targets and setting conditions, which is applied in character and pattern recognition, image data processing, instruments, etc., and can solve problems such as high probability of false detection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
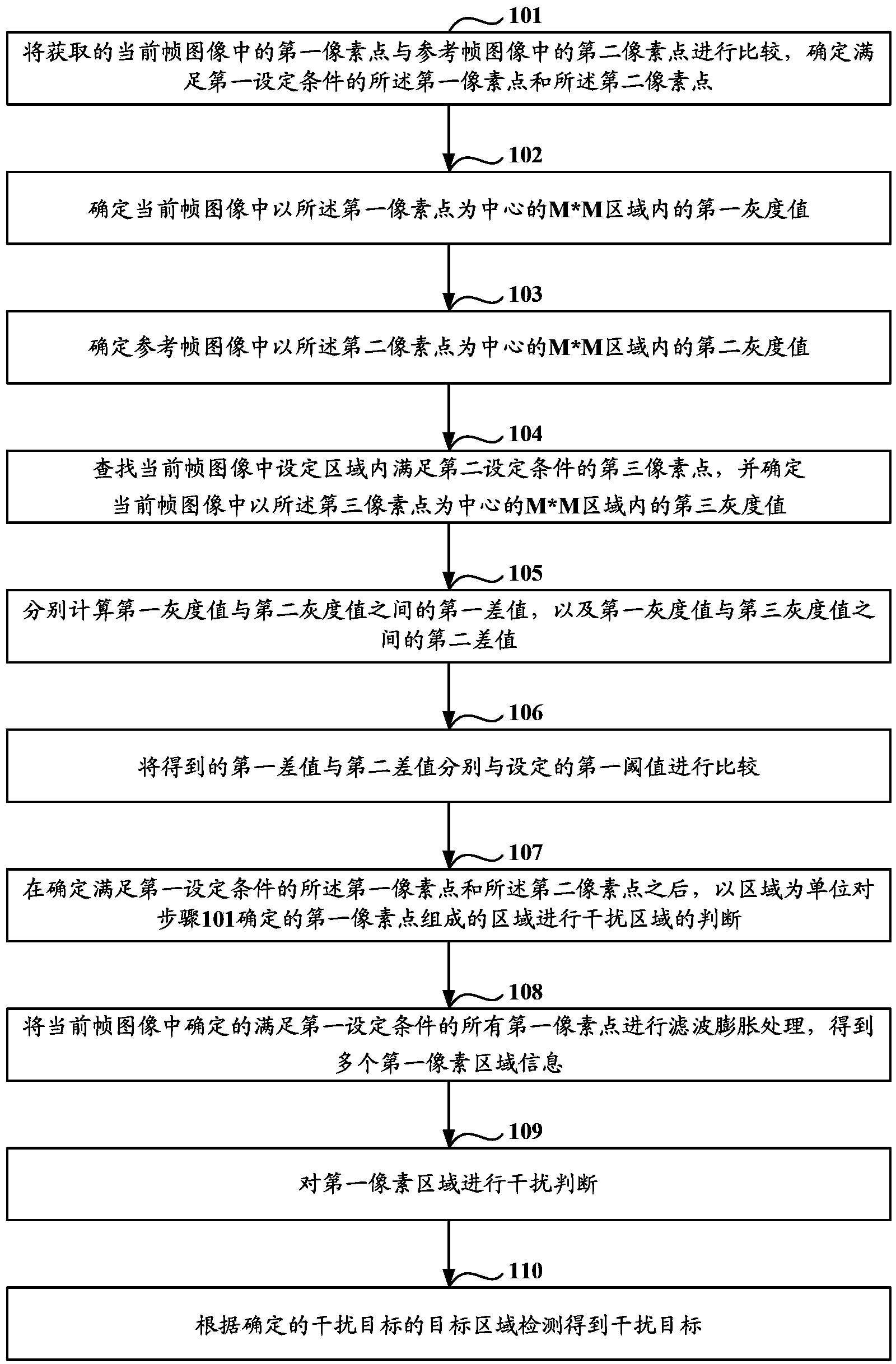
[0034] Such as figure 1 As shown, it is a flow chart of a method for detecting an interference target in Embodiment 1 of the present invention, and the method includes:
[0035] Step 101: Compare the acquired first pixel point in the current frame image with the second pixel point in the reference frame image, and determine the first pixel point and the second pixel point satisfying the first set condition.
[0036] In step 101, when obtaining the image information of the current frame, it is determined that the image information of the reference frame corresponding to the image information of the current frame is selected, and the image of the previous Nth frame in the image information is selected as the image information of the reference frame.
[0037] Specifically, in a set of image information, two frame images set at a frame number interval N are the current frame image and the reference frame image, wherein N can be changed and determined according to needs. For examp...
Embodiment 2
[0120] Such as Image 6 As shown, it is a schematic structural diagram of an interference target detection device according to Embodiment 2 of the present invention. The device includes: a determination module 11, a gray value calculation module 12, and an interference target detection module 13, wherein:
[0121] A determining module 11, configured to compare the acquired first pixel point in the current frame image with the second pixel point in the reference frame image, and determine the first pixel point and the second pixel point satisfying the first setting condition. pixel.
[0122] Grayscale value calculation module 12, used to determine the first grayscale value in the M*M area centered on the first pixel point in the current frame image, where M is an integer not less than 3, and find the current frame The third pixel point in the set area in the image that satisfies the second set condition, and obtain the third gray value in the M*M area centered on the third pix...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More