

Manpower-operated leg type walking vehicle
A walking vehicle and leg-type technology, applied in the field of human-operated leg-type walking vehicles, can solve the problems of weak obstacle-crossing ability and carrying capacity, single configuration, and inability to fully utilize the leg-type structure, etc., to achieve strong carrying capacity and ground passing Excellent performance, rigidity, and ease of handling
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be further described below in conjunction with accompanying drawing.
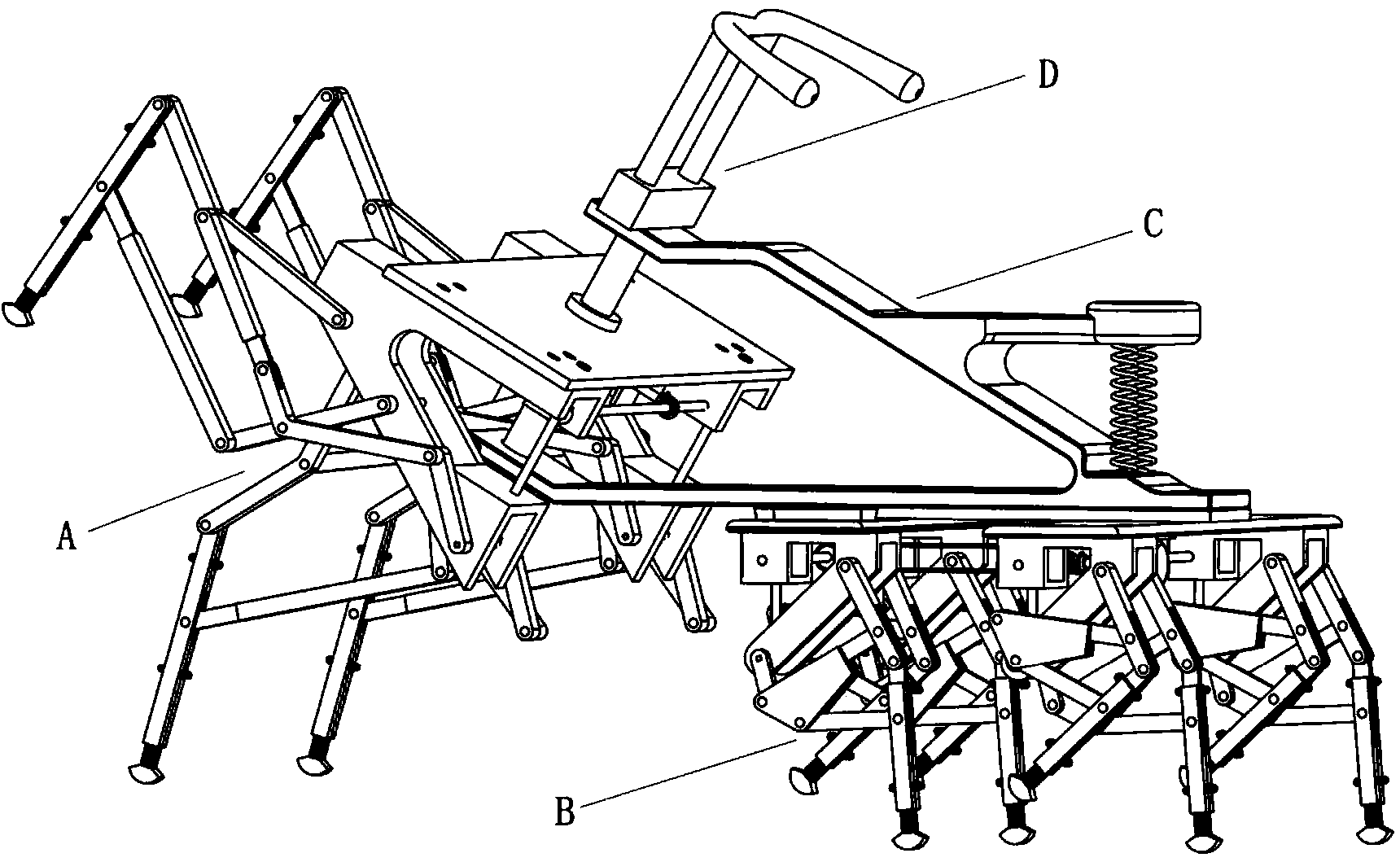
[0026] A human-operated legged walking vehicle, such as figure 1 As shown, it includes the obstacle overcoming mechanism (A), the bearing mechanism (B), the vehicle frame (C) and the steering mechanism (D).
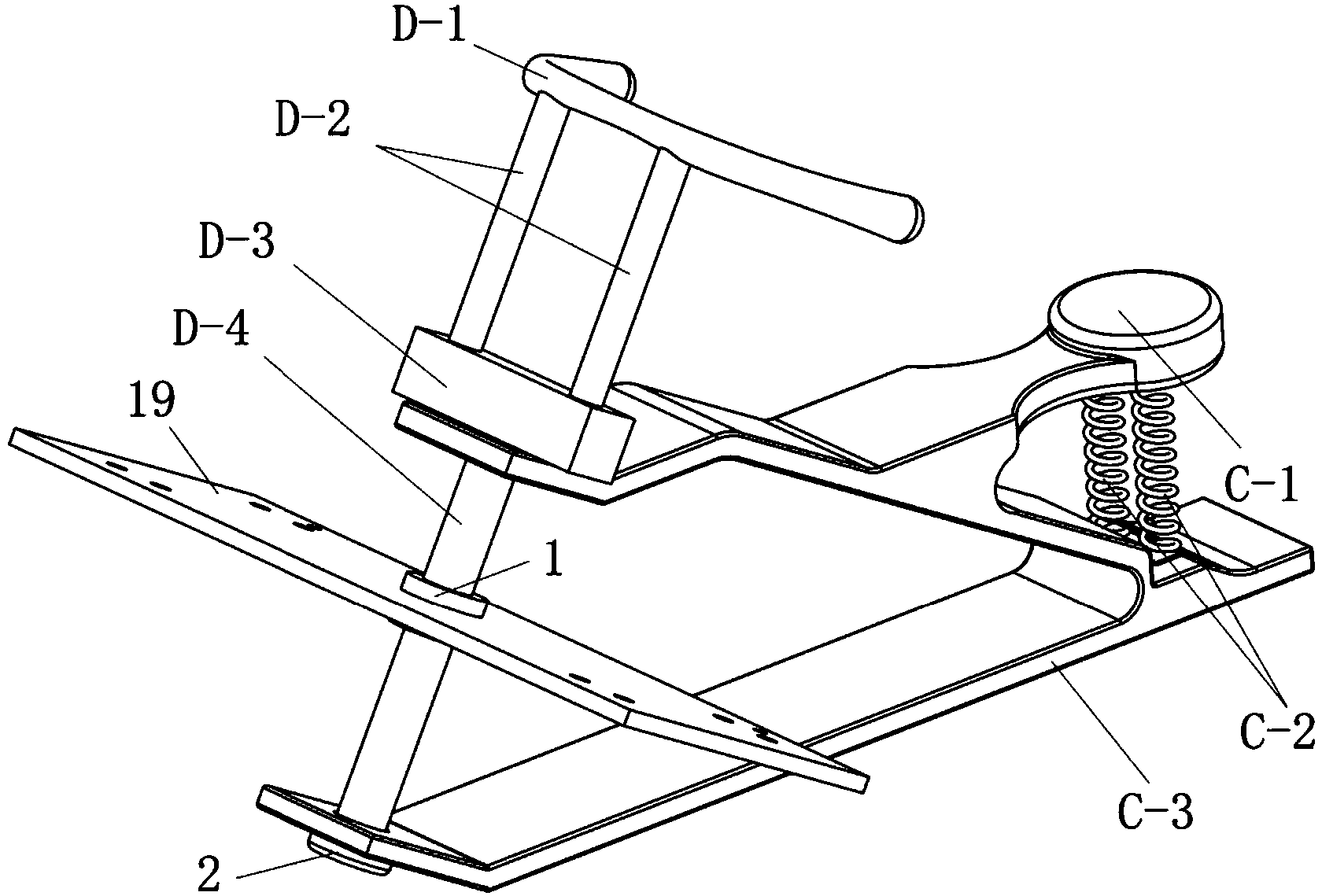
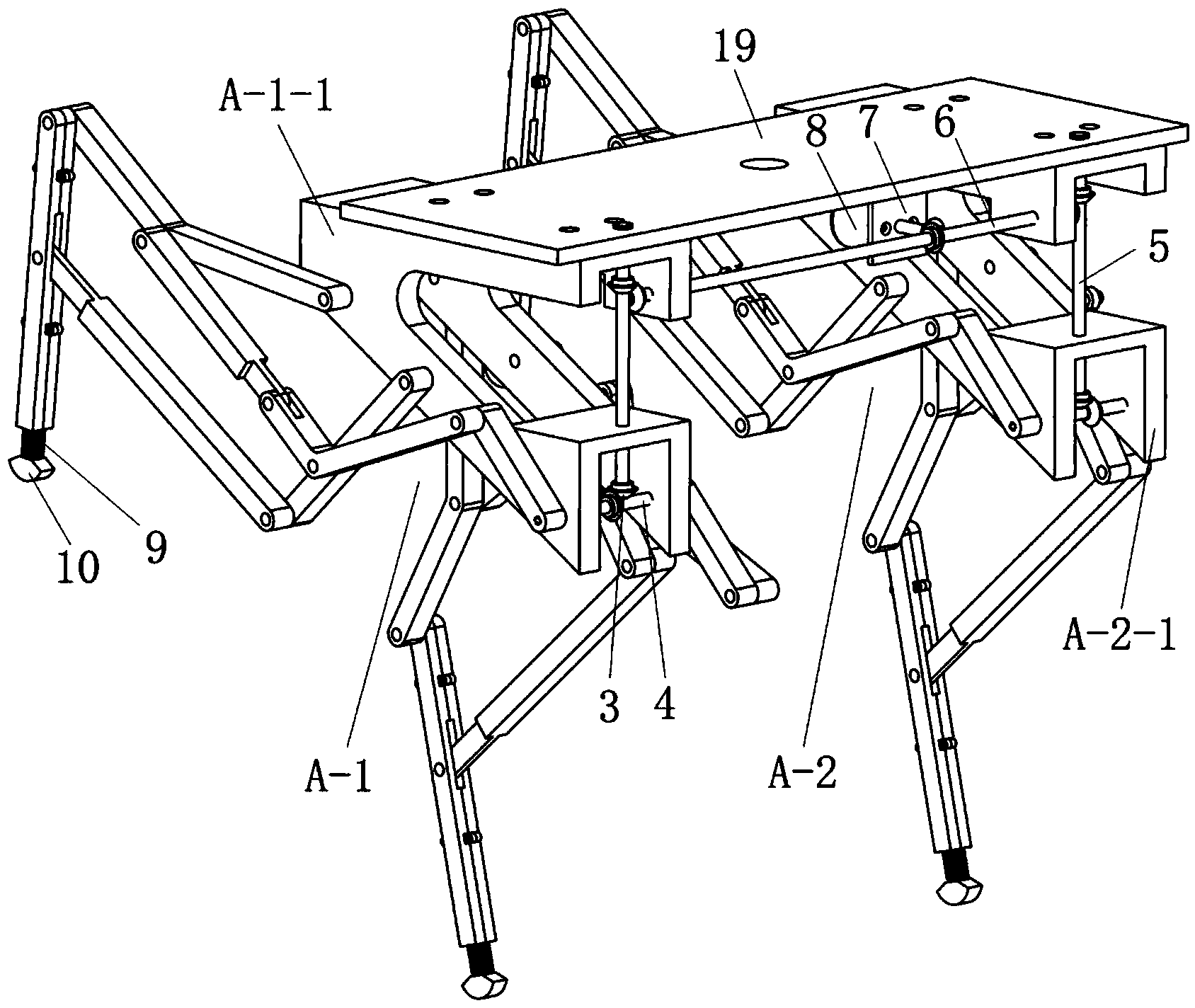
[0027] The connection relationship between the control mechanism (D), the obstacle clearance mechanism (A) and the vehicle frame (C): the rotating shaft (D-4) of the control mechanism (D) passes through the upper platform of the vehicle body (C-3), and the connecting plate 1 (19) is welded up and down to the middle of the rotating shaft (D-4) through the fixing block (1), and the end of the rotating shaft (D-4) is axially fixed to the lower platform of the car body (C-3) by welding the fixing block (2) ;The obstacle-crossing mechanism (A) is connected to the control mechanism (D) through the connection plate 1 (19), and the driver changes the relative position of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More