

Spinule type wall climbing robot with bionic vibration absorption structure
A wall-climbing robot, micro-thorn technology, applied in the direction of motor vehicles, transportation and packaging, etc., can solve the problems that are not involved in the robot's anti-fall and vibration absorption, and achieve the effect of increasing the anti-fall
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and examples. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
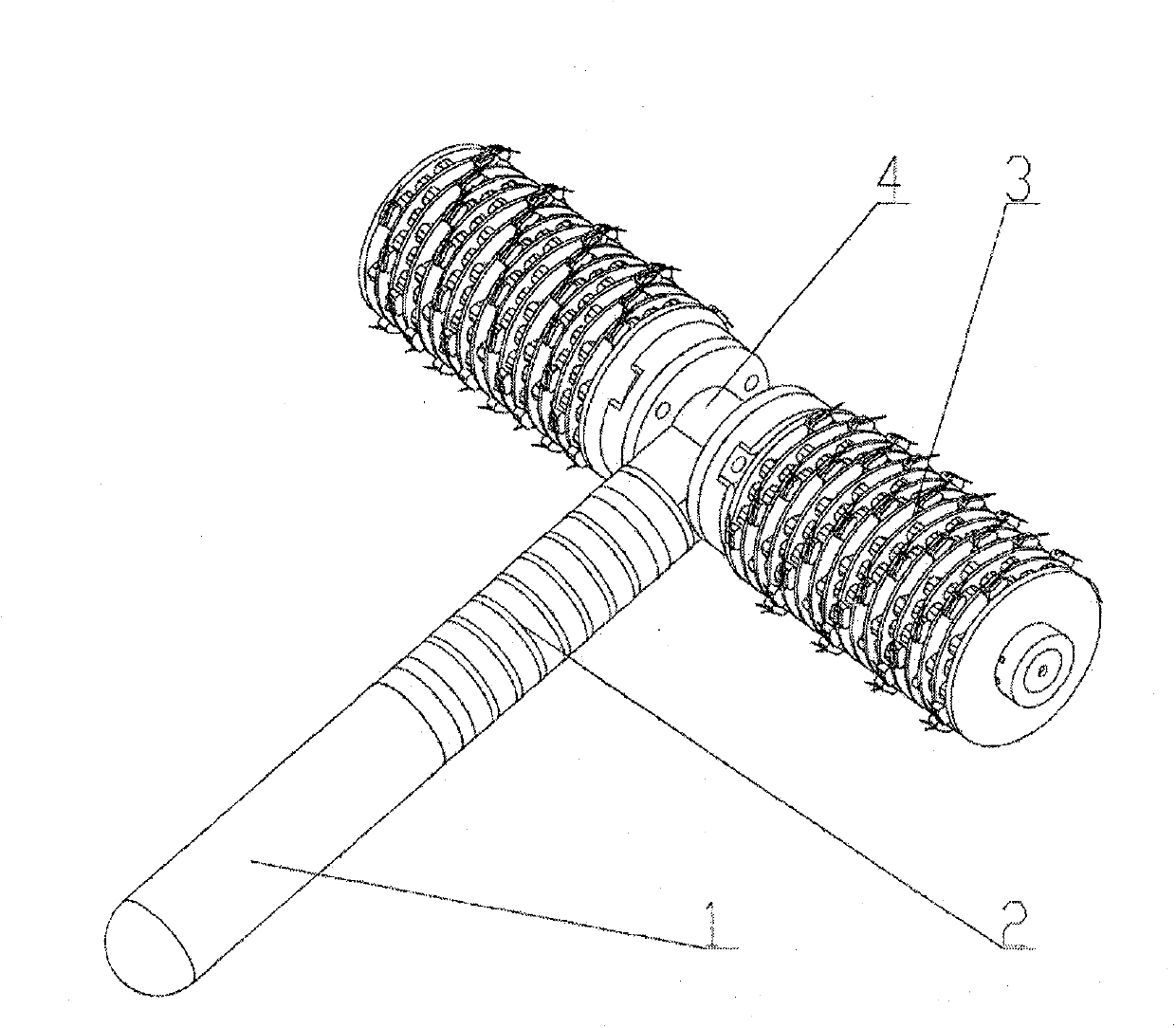
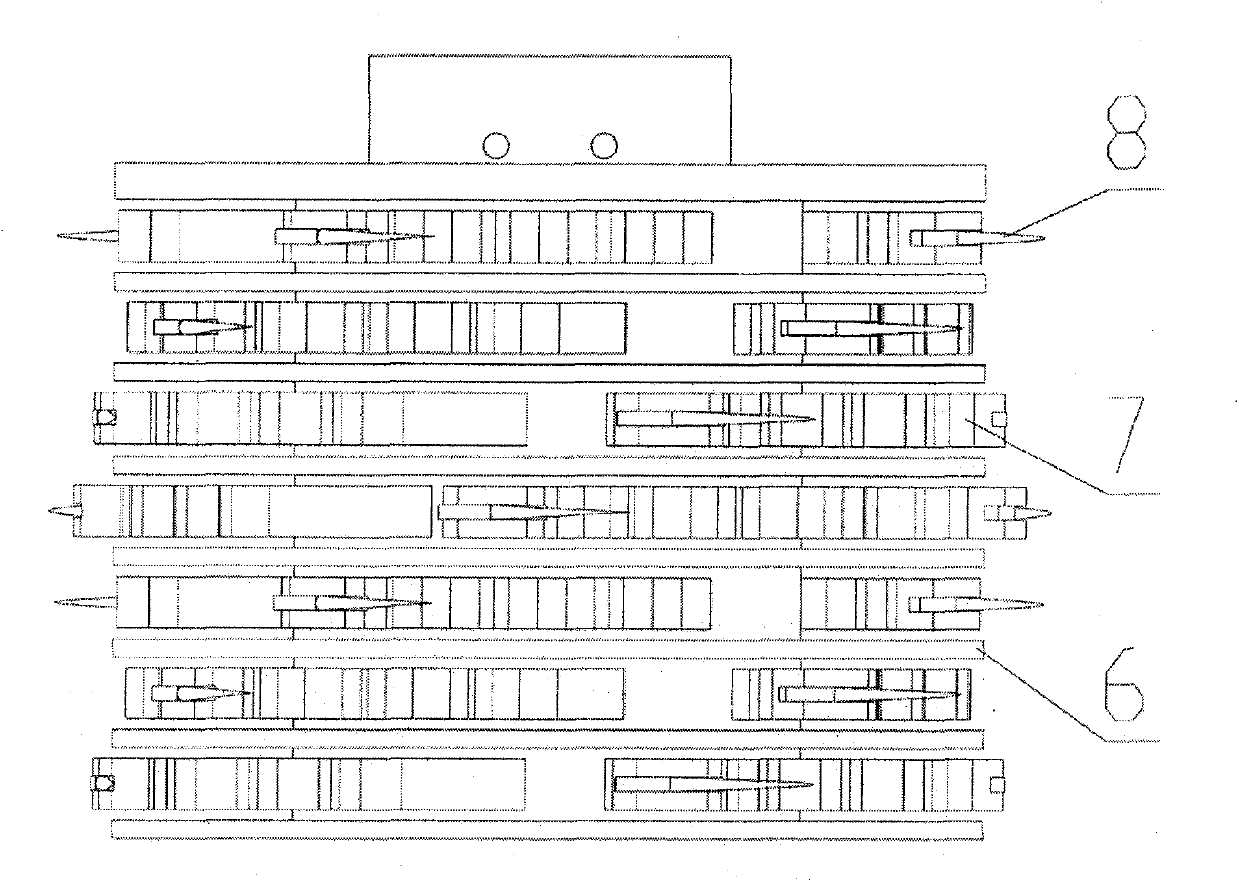
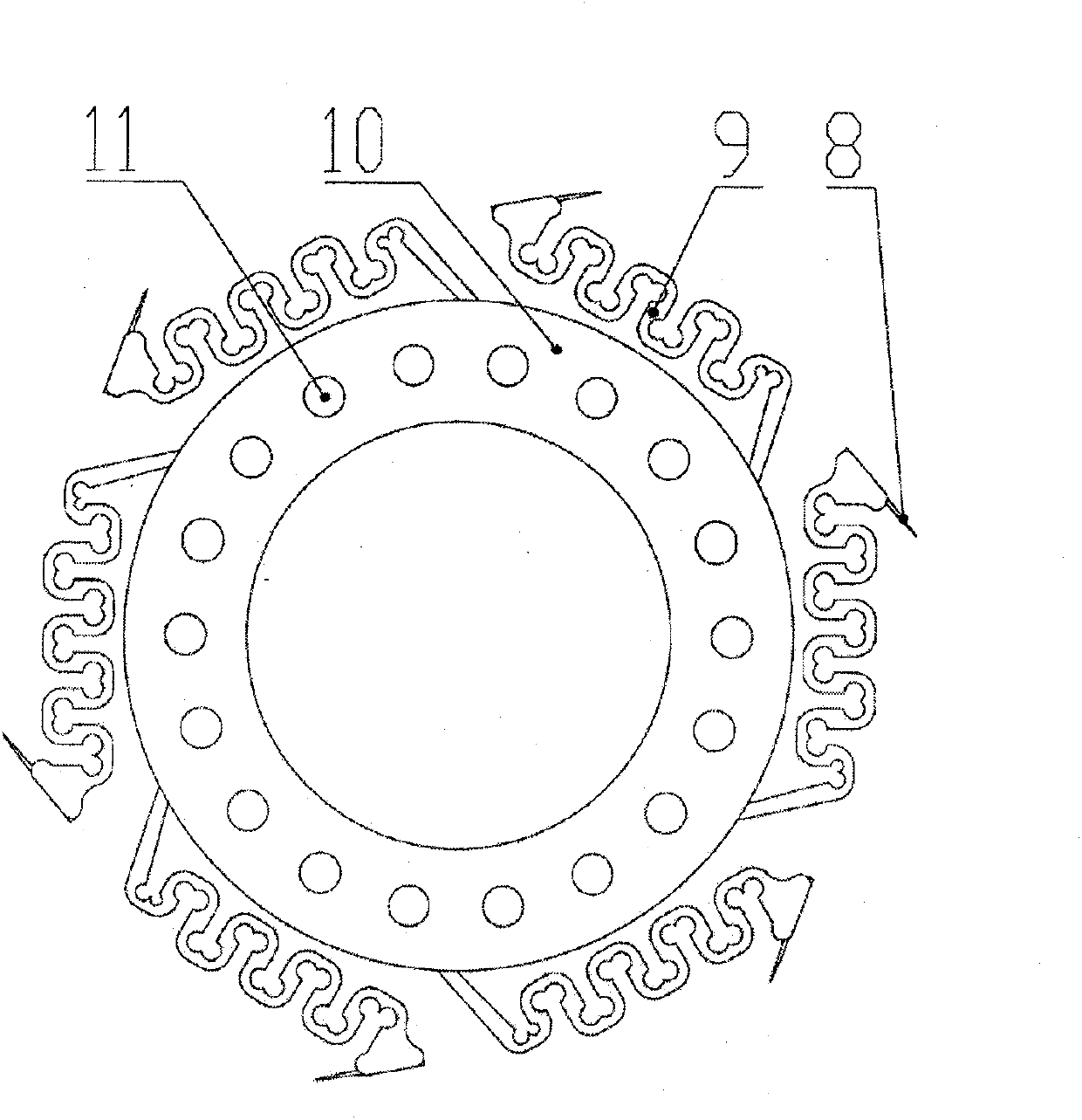
[0020] Such as Figure 1 to Figure 4 As shown, a microthorn wall-climbing robot with a bionic shock-absorbing structure includes a body 4, a tail 1 disposed on the body 4, and runners 3 disposed on both sides of the body 4, the Runner 3 comprises micro-thorn sheet 7 and spacer 6 that are arranged at intervals, and described micro-thorn sheet 7 includes micro-thorn 8, flexible part 9 and the rotating disk 10 that is arranged on the circular axis of described body, and described flexible part 9 will The micro spines 8 are connected to the side edge of the turntable 10 . The two runners 3 are independently driven by a motor. A vibration-absorbing unit 2 is also provided betwe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More