

Machine vision-based automatic navigation method for magnetic grinding of elbow
A technology of automatic navigation and machine vision, applied in the fields of B-spline curve fitting, robot control, image processing, and computer vision, which can solve the problem that the axis curve of the elbow cannot be determined.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
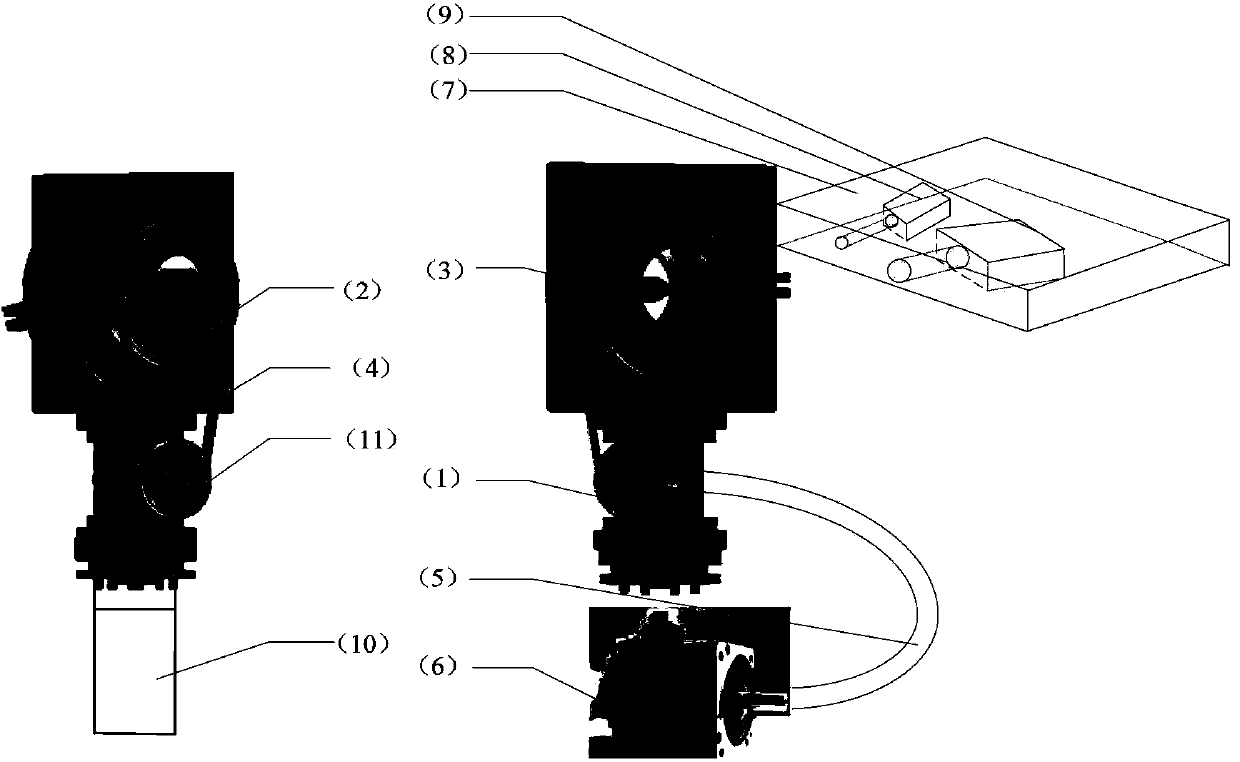
[0034] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
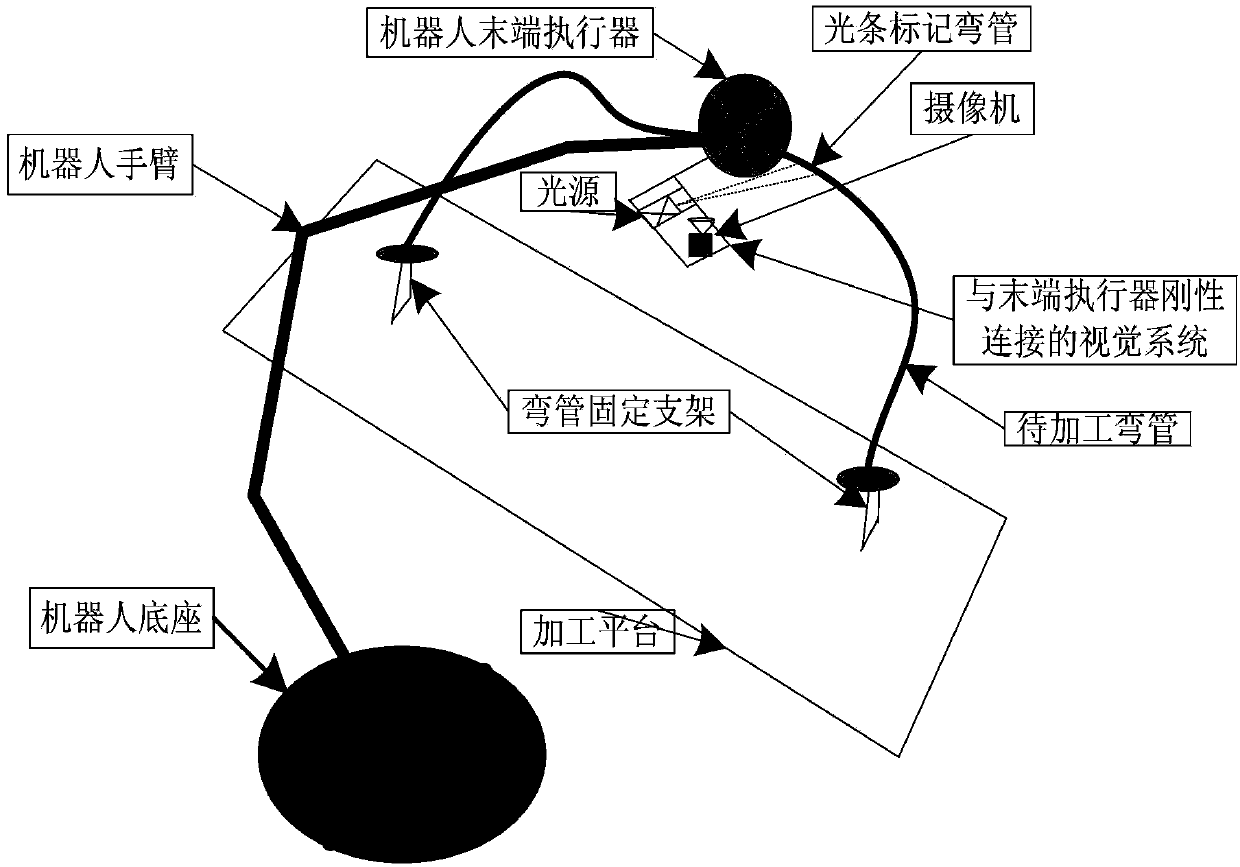
[0035] The technical solution of the invention is to use computer vision to track the free curved pipe in real time, so as to achieve magnetic grinding of the inner wall of the curved pipe.
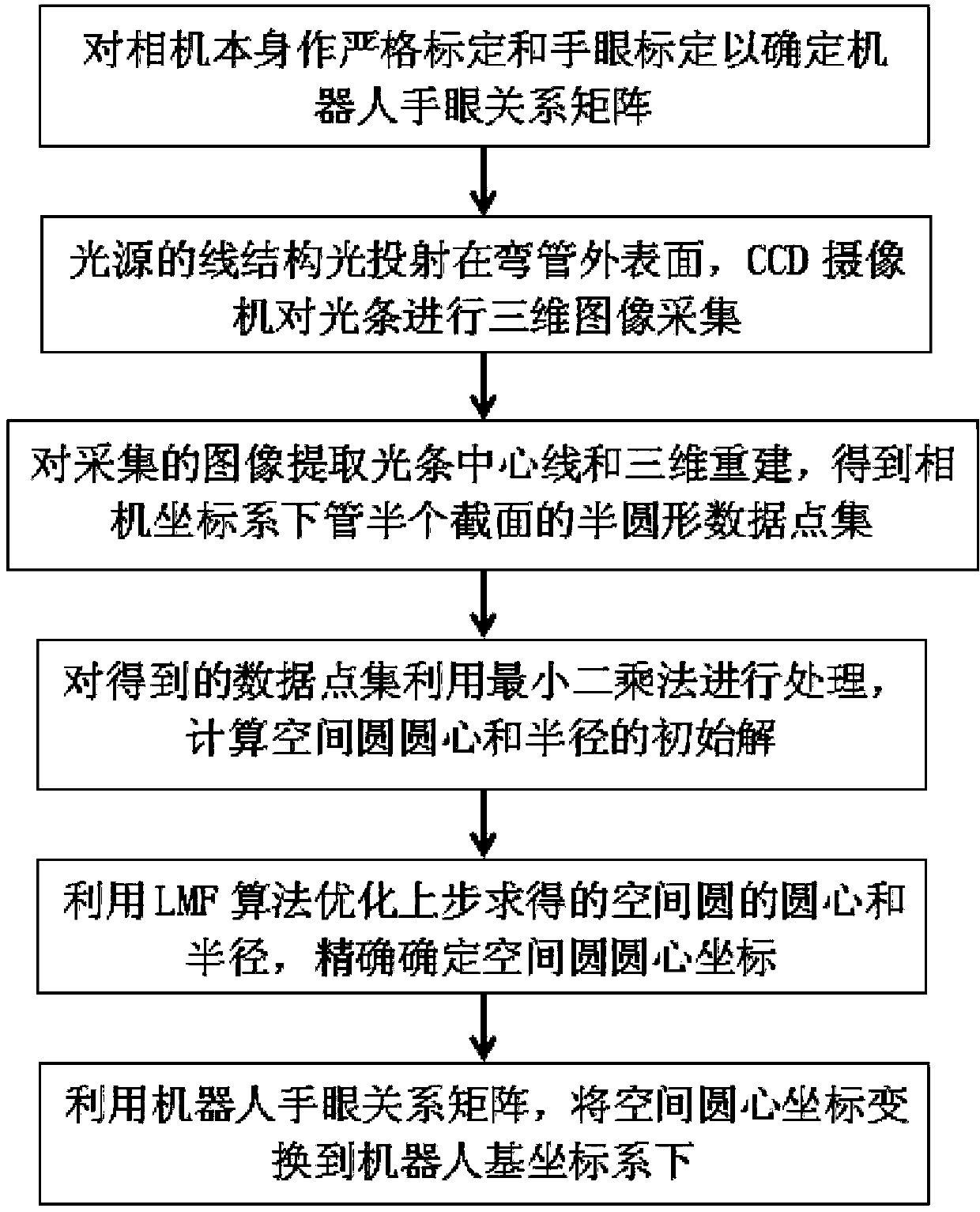
[0036] Firstly, strict calibration and hand-eye calibration of the visual camera itself are required to determine the robot hand-eye relationship matrix;
[0037] The line structured light of the light source is irradiated on the outer surface of the cross-section of the elbow to form a semicircular light strip. The CCD camera captures the image and reconstructs it in 3D to obtain a set of three-dimensional points on the outer surface of the half cross-section of the elbow. The three-dimensional points The set is relative to the local coordinate system of the camera;
[0038] Carry out radius-constrained least-squares fitting and optimization on the thre...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More