

Ground navigation planning control method of rover
A planning control and patrol technology, applied in three-dimensional position/channel control, etc., can solve the problems of inability to realize real-time control of the Mars rover, low planning efficiency, and low control accuracy, so as to achieve high planning efficiency, reduce calculations, and improve safety Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
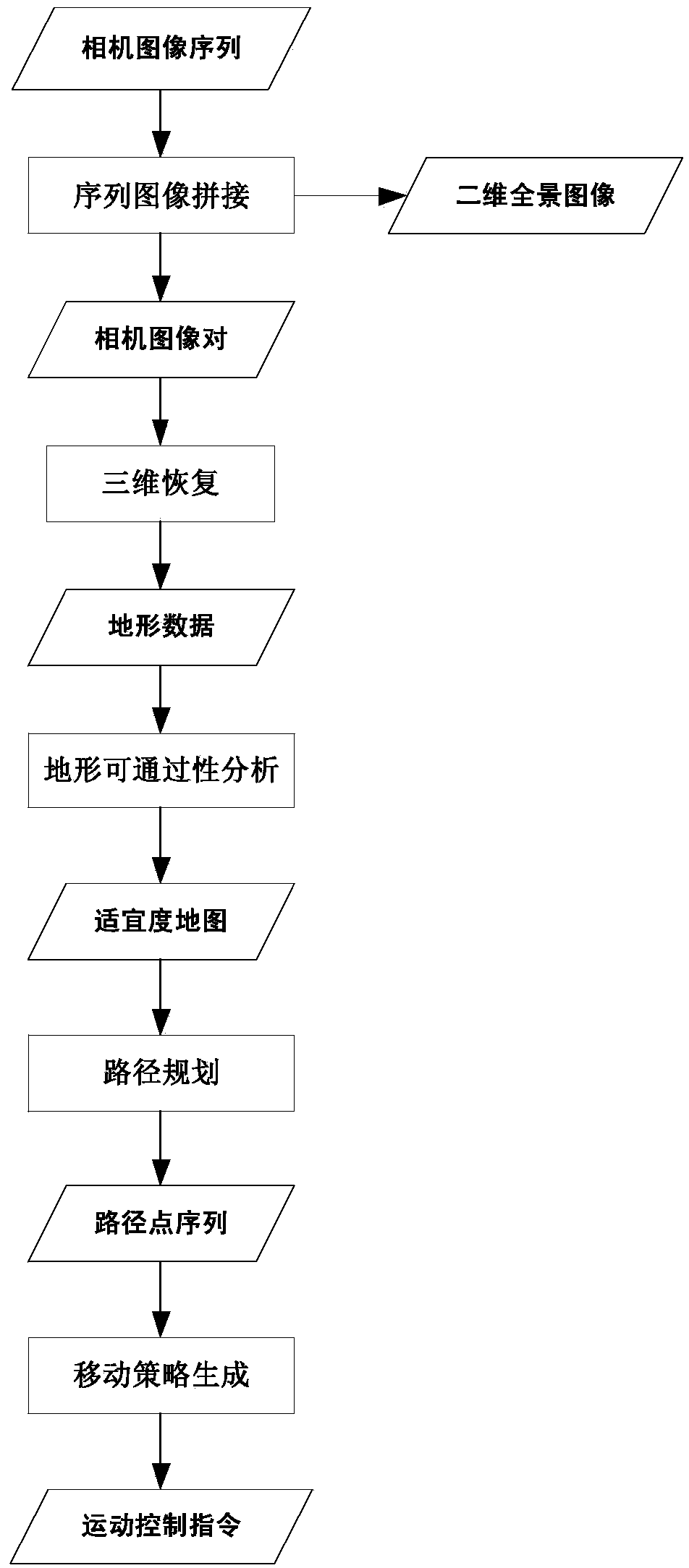
[0040] Taking the lunar patrol detector as an example, the specific realization of the ground navigation planning control for the patrol is as follows:
[0041] (1) Sequence image stitching
[0042] Let the navigation camera of the patroller perform sequential imaging from the left to the right at an angle interval of 20° from -40° to 40°, and obtain 5 pairs of camera images. Find the corresponding relationship between two adjacent images in the sequence images, and stitch the sequence images into a two-dimensional panoramic image with a wide field of view, such as figure 2 shown;
[0043] (2) Three-dimensional restoration
[0044] Given the target position (6.7,-0.3) controlled by the navigation planning, according to the position of the target, the angle between the target direction and the advancing direction of the patrol is calculated to be about ψ=atan2(-0.3,6.7)=-2.564° , and the third pair of images in the sequence image is taken at 0°, so it can be known that the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More