

Flexible object deformation simulation method for force haptic human-computer interaction
A technology for human-computer interaction and flexible objects, applied in the field of flexible tactile interaction, which can solve the problems of accuracy and real-time difficulty of spring mass model
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0077] The technical solutions provided by the present invention will be described in detail below in conjunction with specific examples. It should be understood that the following specific embodiments are only used to illustrate the present invention and are not intended to limit the scope of the present invention.
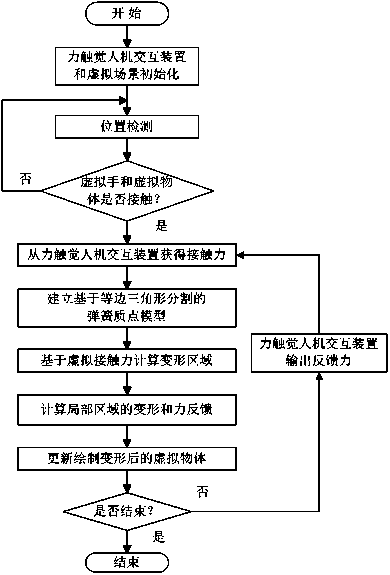
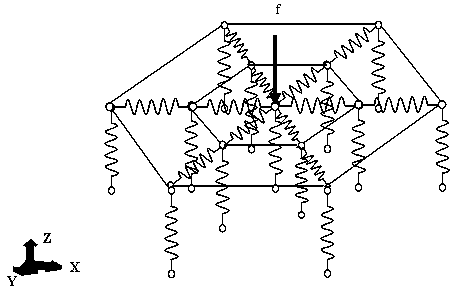
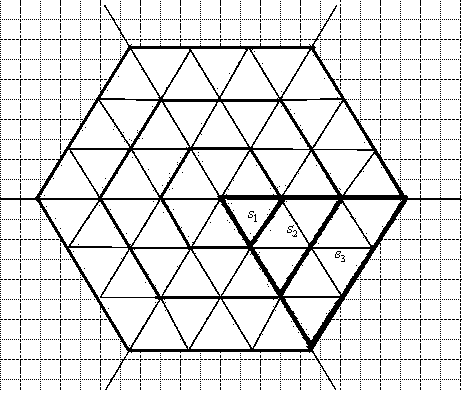
[0078] In this example, the Phantom Omini hand controller is used as a force-tactile human-computer interaction device, and an isotropic cuboid composed of 6058 particles and 11328 equilateral triangular grids (such as Figure 5 shown) as an example to carry out the simulation, the isotropic virtual cuboid is pressed and deformed, and the force-tactile information generated during the interaction process is fed back to the operator in real time. The software is programmed with VC++6.0, MFC, and OpenGL. The deformation simulation is realized on the PC with Pentium42.80GHz, 1GB memory and NVIDIA GeForce2 graphics card. Specifically, the simulation process as figur...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More