

Inverse kinematic solving method based on neural network
A neural network and inverse motion technology, applied in the field of inverse motion solution based on neural network, can solve problems such as single calculation result, long numerical calculation time for inverse motion solution, and difficulty in guaranteeing convergence.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
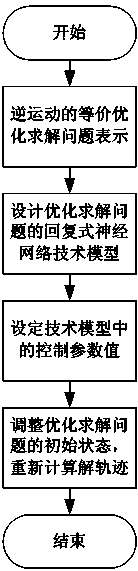
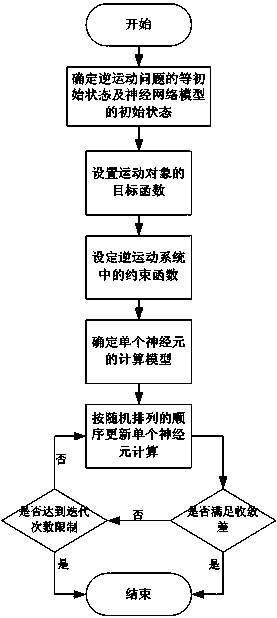
[0032] The invention provides an inverse motion optimization solution method based on a neural network method, which mainly adopts a revertive neural network model to solve the generalized inverse motion problem. Due to the fast and stable convergence ability of the revertive neural network for the extreme points of system energy, it can solve the motion trajectory. Well solve the inverse motion simulation problem of 3D character animation.
[0033] In the three-dimensional character animation rendering, the present invention represents the original problem as an equivalent optimization problem from the perspective of optimization solution under the condition of given inverse motion initial value and target, and utilizes the optimization solution ability of the revertive neural network model, Through the design of the model parameters, the optimal or nearly optimal motion trace of the inverse motion problem can be obtained stably and quickly, and the diversity of motion traces...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More