

Multi-robot formation control path tracking method based on Bluetooth communications
A Bluetooth communication, multi-robot technology, applied in two-dimensional position/channel control and other directions, which can solve problems such as poor tracking accuracy, slow robot movement, and limited transformation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The specific implementation manner of the tracking system will be described below in conjunction with the accompanying drawings.
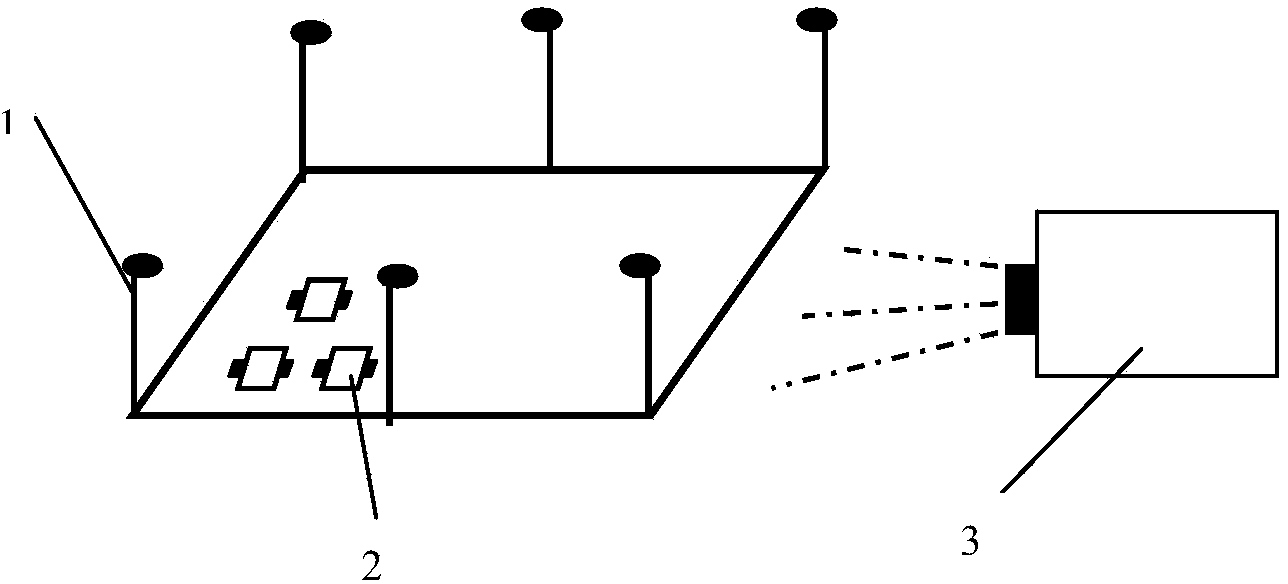
[0048] figure 1 A schematic diagram of the overall structure of the tracking system is described. The tracking system is mainly composed of the following components: several two-wheel differential drive robots, iSpace position capture system, host computer and Bluetooth communication module. The two-wheel differential drive robot is placed on the iSpace position capture system covering the entire robot motion platform consisting of 6 cameras. The iSpace position capture system is connected to the host computer through cables, and the Bluetooth communication module is connected to the host computer. The differential drive robot communicates with the upper computer through the Bluetooth communication module.
[0049] Two-wheel differential drive robot can choose LEGO's nxt two-wheel differential drive robot, each robot has the same physical s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More