

Particle filtering method and device, and target tracking method and device
A particle filter and particle technology, applied in the field of nonlinear filtering, can solve the problems of particle diversity and poor accuracy, affect the parallel implementation of particle filter, and cannot effectively represent the posterior probability distribution, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0070] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only part of the embodiments of the present invention, not all of them. Based on the implementation manners in the present invention, all other implementation manners obtained by persons of ordinary skill in the art without making creative efforts belong to the scope of protection of the present invention.
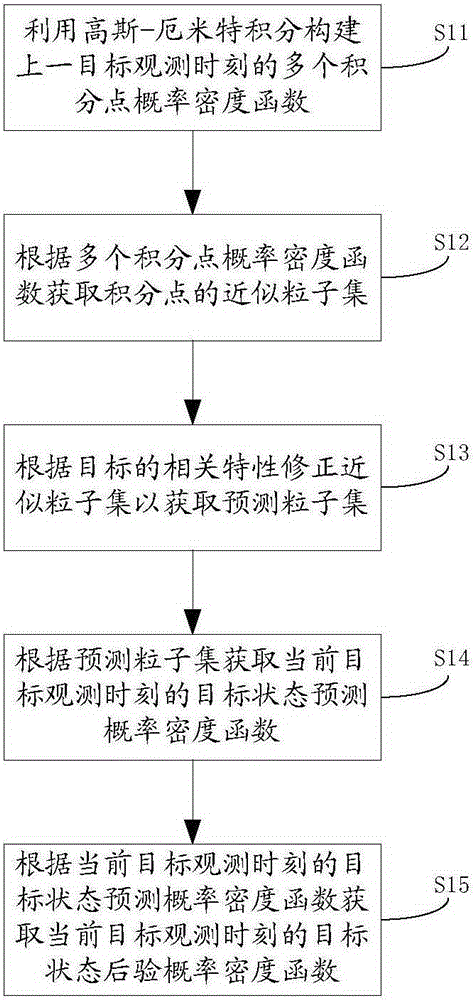
[0071] The particle filter method is a nonlinear filtering method based on sequence Monte Carlo simulation, which refers to approximating the probability density function by looking for a group of random samples propagated in the state space, and using the particle filter method to analyze the targets such as aircraft, aviation vehicles, and vehicles. Estimate the real-time state of the target and realize the tracking of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More