Patroller positioning method based on spliced images
A technology of splicing images and positioning methods, applied in image analysis, image data processing, instruments, etc., can solve the problems of limited scale difference, small number of feature points, lack of texture, etc., to increase the range, improve the matching success rate, avoid The effect of a failed match
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
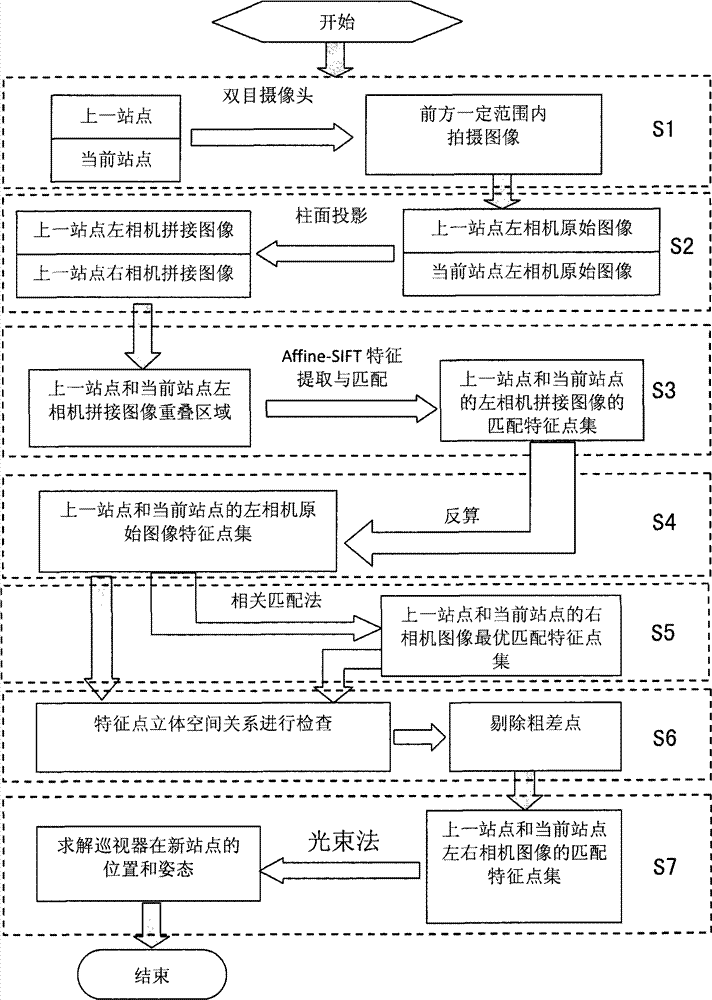
[0025] Such as figure 1 As shown, the present invention provides a kind of patrolling device location method based on mosaic image, comprises the following steps:
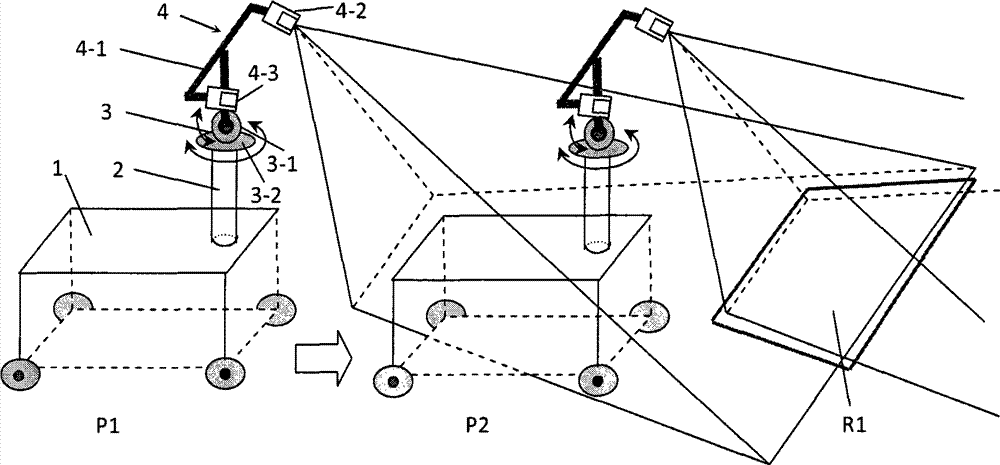
[0026] Step S1: Take the known site of the patrol as the previous site, and the new site that the patrol arrives at a certain distance forward as the current site, and use the binocular stereo camera to take a sequence of images within a certain angle range in front of the previous site and the current site .
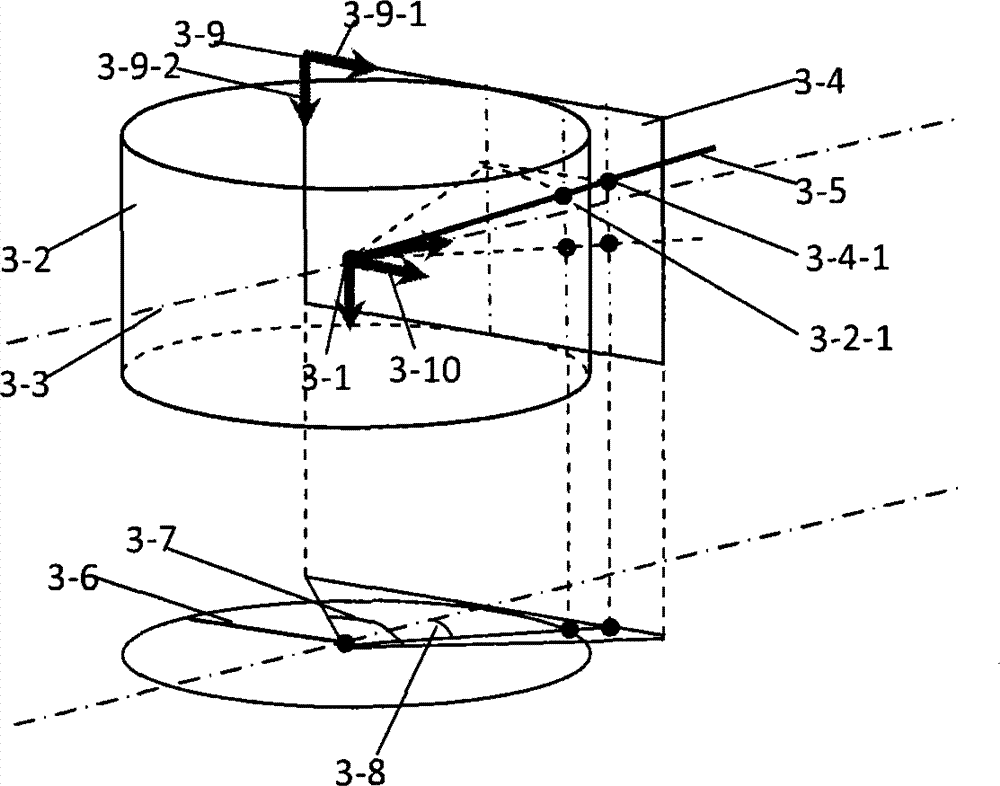
[0027] Such as figure 2 As shown, the patrol is a mobile robot with four driving wheels, including the patrol car body, a vertical mast mechanism located above the front of the car body, a two-degree-of-freedom pan-tilt mechanism at the top of the mast, and a support mounted on the pan-tilt The binocular camera on the rack; the gimbal can rotate on the two degrees of freedom of pitch and yaw, and the camera can be controlled to take images in different directions through the rotation of the gimbal; the ma...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com