

Lane line detection and GIS map information development-based vision navigation method
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be described in detail below in conjunction with the accompanying drawings.
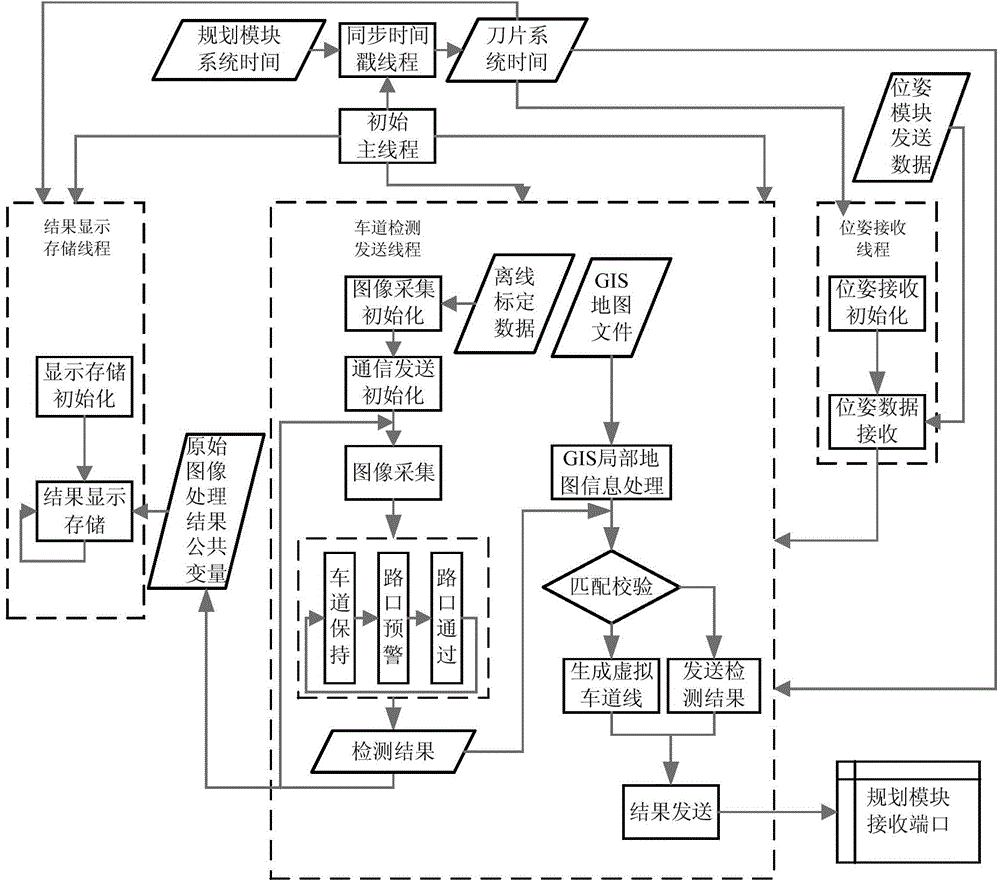
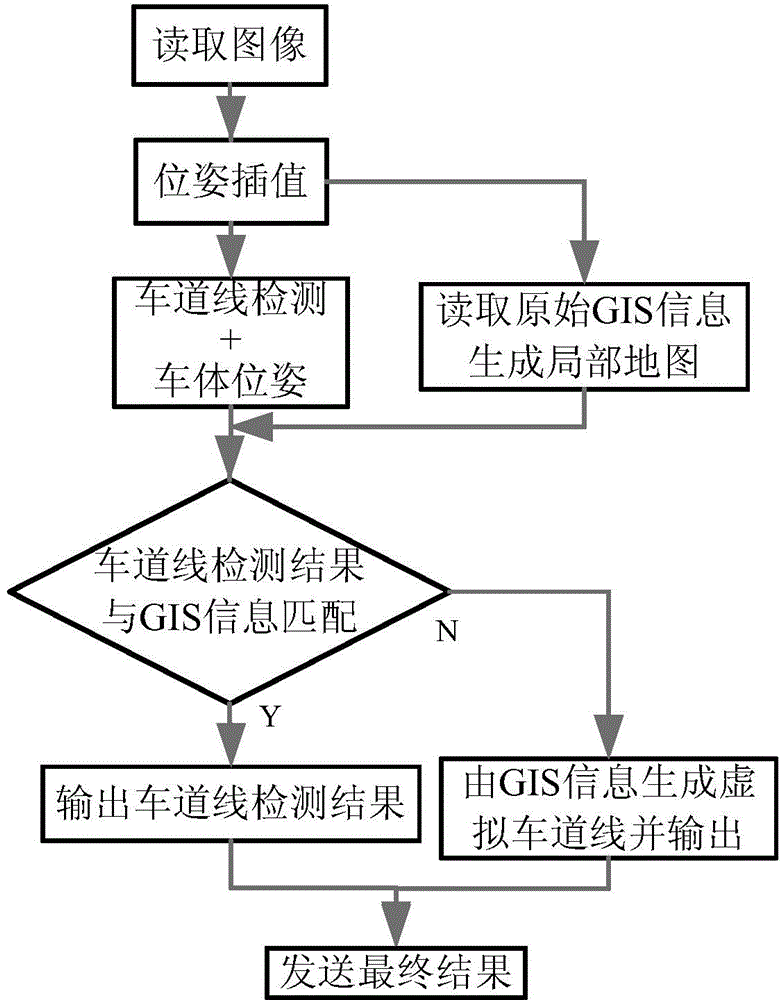
[0036] see figure 1 as well as figure 2 , the method mainly includes the following steps:
[0037] 1) Collect and preprocess GIS map information in advance;
[0038] 2) Collect images in real time and perform lane line detection;
[0039] 3) Real-time generation of GIS local maps;
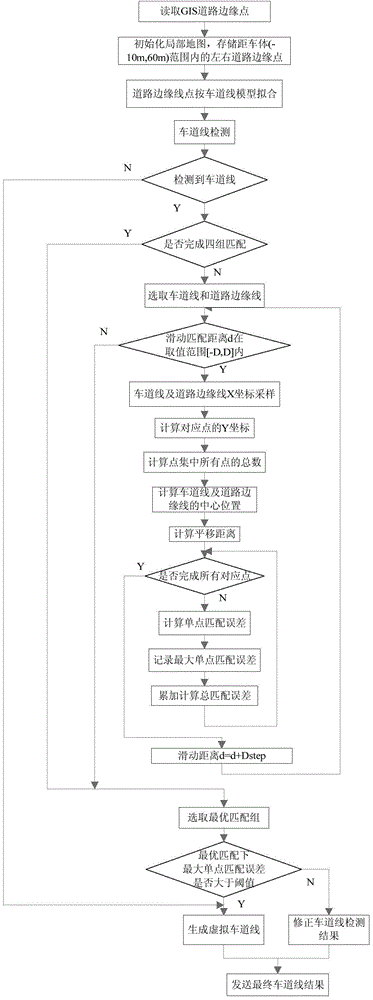
[0040] 4) The lane line detection result is matched with the GIS local map for verification;
[0041] 5) Generate a highly reliable lane line result based on the matching result.
[0042] The GIS map road edge information to be used in the algorithm is realized through on-the-spot GPS data collection and map marking. During calibration, the left edge of the road and the right edge of the road are marked respectively, and the marked road is one-way, and each road section is arranged in the order of the predetermined driving route. The data form of the map information is given in th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More