

Method for dynamically calculating and correcting course angle of navigation system of magnetometer
A technology of navigation system and correction method, which is applied in the direction of navigation computing tools, measuring devices, instruments, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0045] The present invention will be further explained below in conjunction with the accompanying drawings.
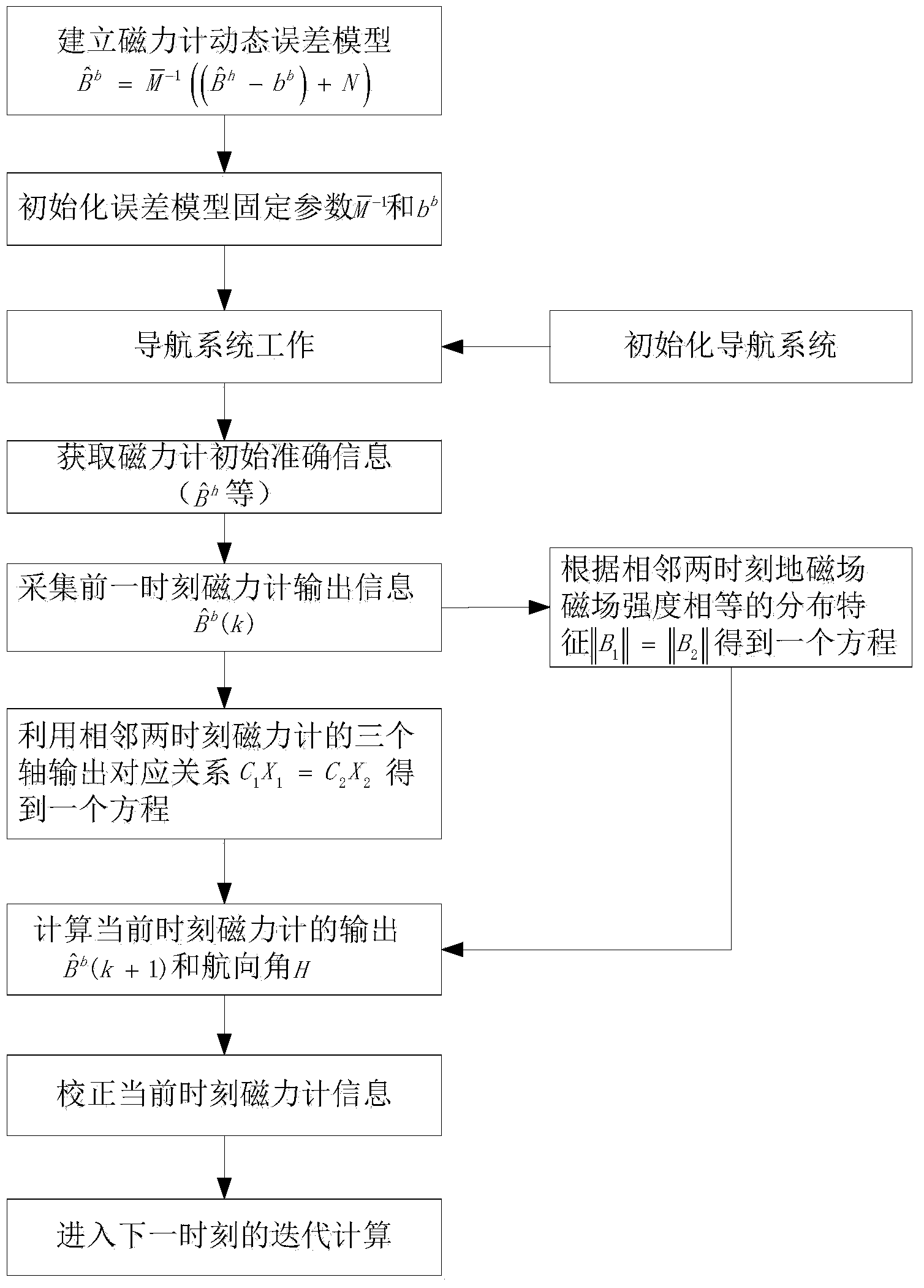
[0046] like figure 1 As shown, the dynamic calculation and correction method of the heading angle of the magnetometer navigation system includes the following steps:
[0047] Step 1: Establish the dynamic error model of the magnetometer.
[0048] The error sources of the magnetometer can be divided into two categories. The first category is the instrument error of the magnetometer itself, and the second category is the error caused by the influence of the external environment. Among them, the first type of error can be considered as not changing with the external environment, and can be obtained through one correction; and when the external environment changes, the second type of error will change accordingly, so it can be set as a variable parameter . Therefore, the general error model of a magnetometer can be composed of these two types of errors, as follows:
[...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More