

Collaborative Experiment Platform for Multi-Mobile Robot System and Its Visual Segmentation and Localization Method
A mobile robot and experimental platform technology, applied in the direction of two-dimensional position/channel control, etc., can solve the problems that cannot satisfy the cooperative experiment of multi-mobile robot system, and achieve the effect of improving the speed of visual segmentation, reducing the amount of calculation, and improving the positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The multi-mobile robot system collaborative experiment platform of the present invention and its visual segmentation and positioning method are described in detail below in conjunction with the accompanying drawings:
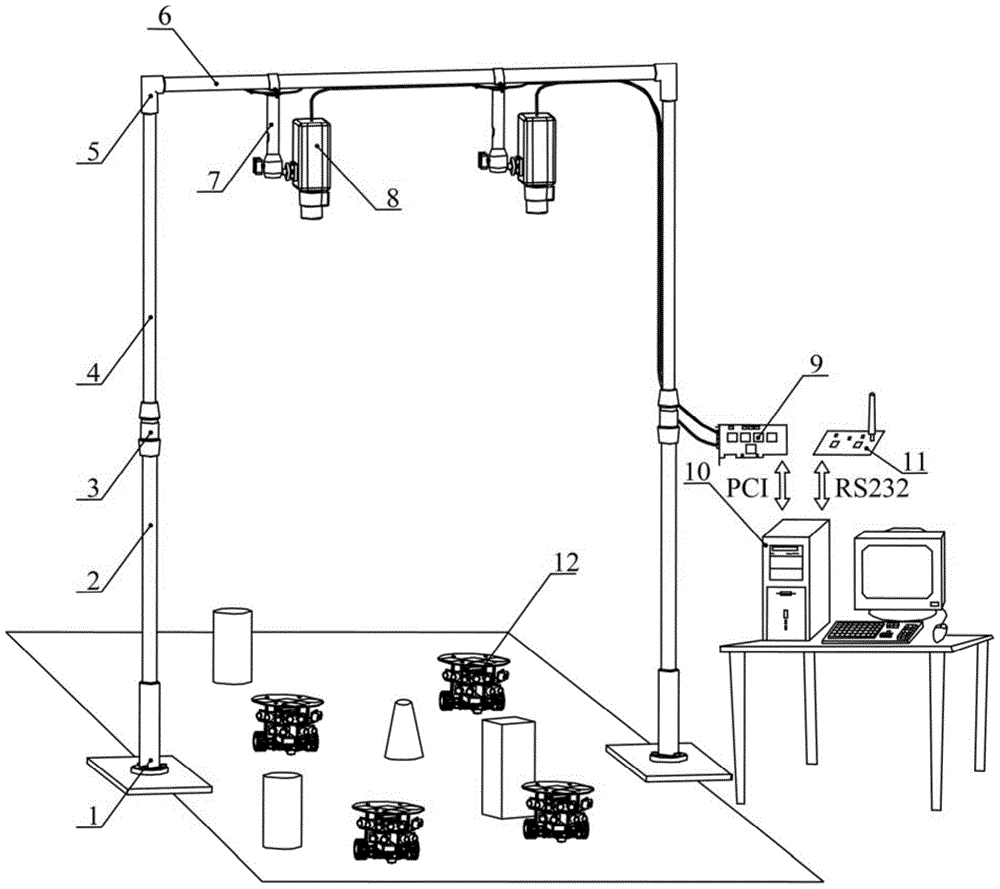
[0048] The multi-mobile robot system collaborative experiment platform is composed of a global vision monitoring system and multi-mobile robots.
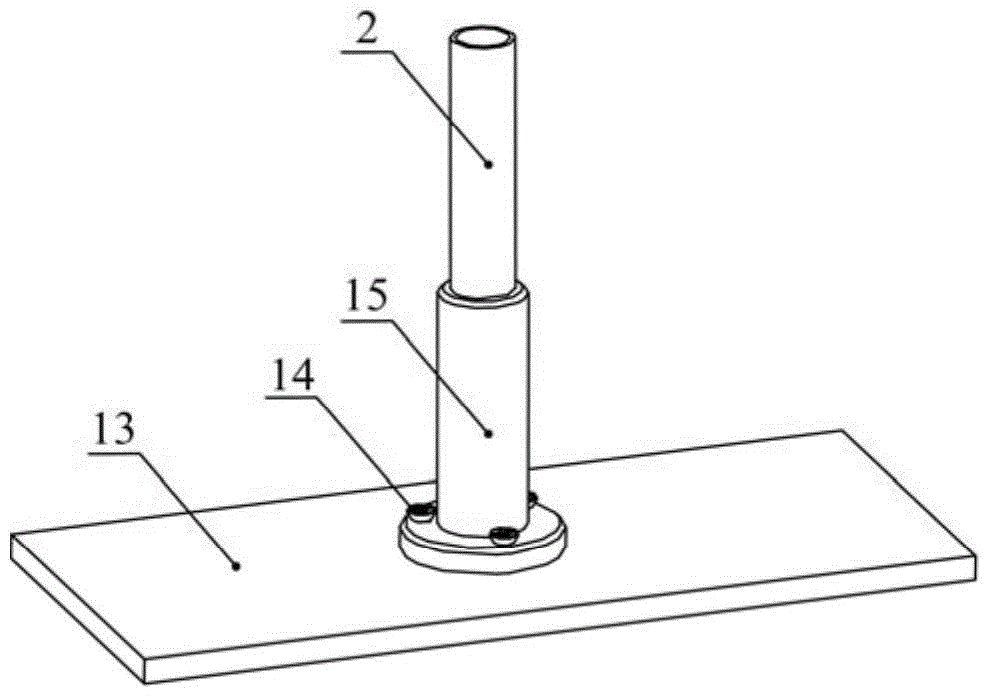
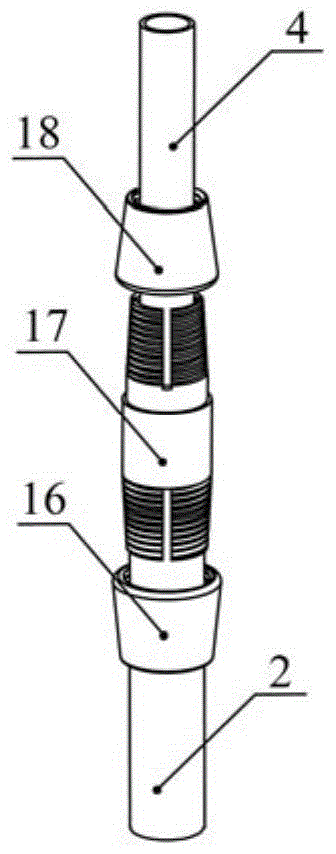
[0049] like figure 1 As shown, the CCD camera 8 is installed on the horizontal support pipe 6 supported by the gate shape through the camera bracket 7, and the CCD camera 8 is connected with the image acquisition card 9 through the video line, and the image acquisition card 9 is installed in the PCI slot of the monitoring host 10. The horizontal support pipe 6 of the door-shaped support is connected with the vertical upper support pipe 4 through the L-shaped connector 5, and the vertical upper support pipe 4 is inserted into the vertical lower support pipe 2 through the two-way fastener 3, and the vertical lowe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More