

Space non-cooperative target pose measurement method based on model
A non-cooperative target and space technology, which is applied in the field of model-based space non-cooperative target pose measurement, can solve the problems of low measurement accuracy and real-time performance of space non-cooperative target, and cannot be applied to space non-cooperative target on-orbit service tasks. , to avoid the reduction of system reliability, avoid computational complexity, and achieve good real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be further described below in combination with preferred embodiments.
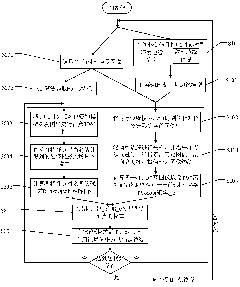
[0027] The model-based relative pose measurement method of space non-cooperative targets proposed by the present invention includes two parallel frameworks based on model-based extraction of visible edge features (abbreviated as MBT) and model-based extraction of image feature point pairs (abbreviated as KLT), and then all features Point pairs are uniformly assigned weights to compute relative poses. The whole method flow is as figure 1 As shown, the steps of each part are as follows:
[0028] The described framework for extracting visible edge features based on the model specifically includes the following steps:
[0029] S101. Based on the structural model (hereinafter referred to as the target model) of the non-cooperative target in space (hereinafter referred to as the target), use the 3D rendering engine to obtain the visible edge model of the target in the relative...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More