Quadrilateral mechanism based snakelike robot
A quadrilateral mechanism, snake-shaped robot technology, applied in the field of robot research and engineering, can solve the problems of no shell, heavy weight, limited application, etc., to achieve the effect of improving motion stability, reducing overall weight, and improving the ability to overcome obstacles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be further described in detail below with reference to the drawings and specific embodiments.
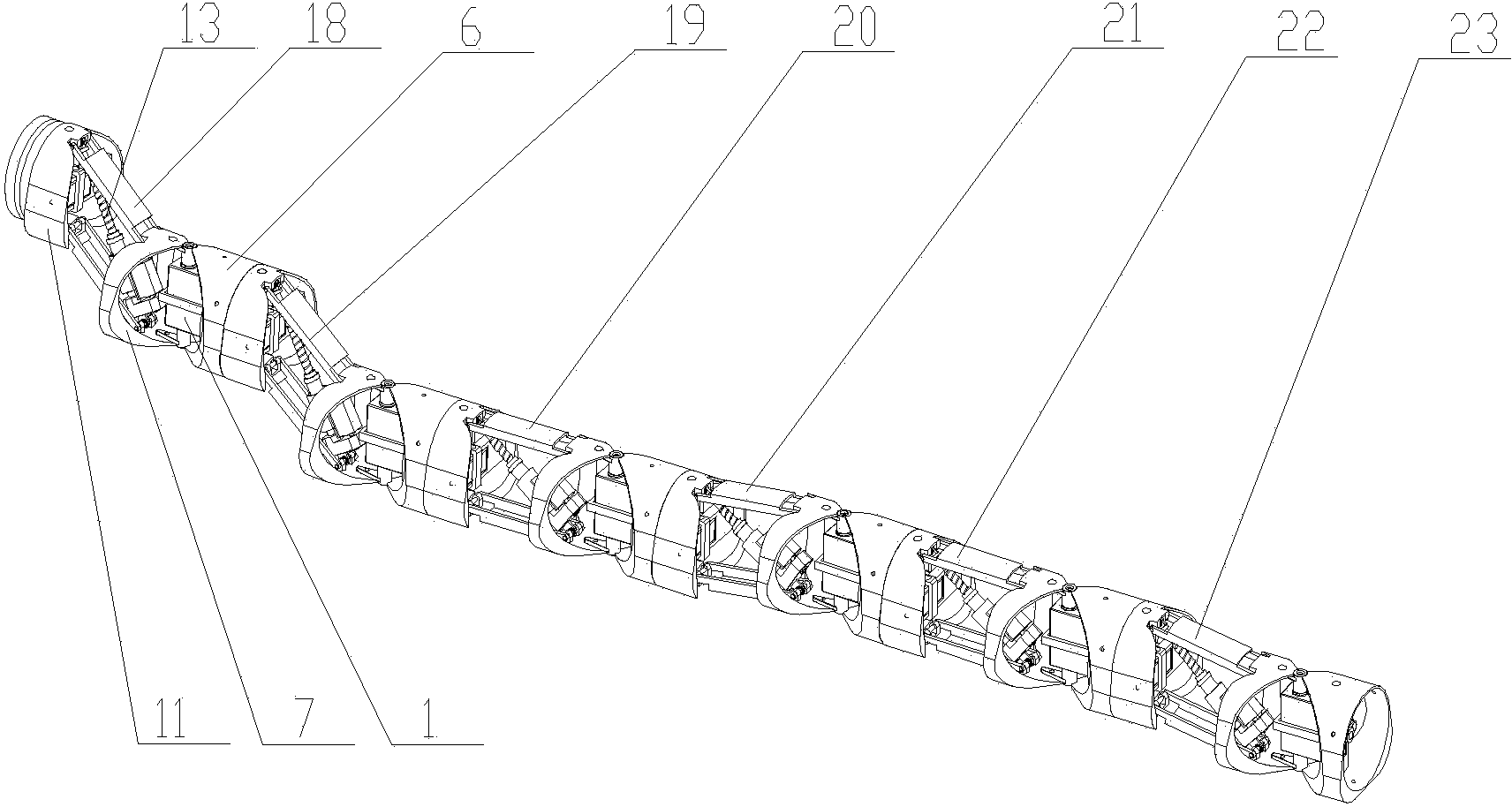
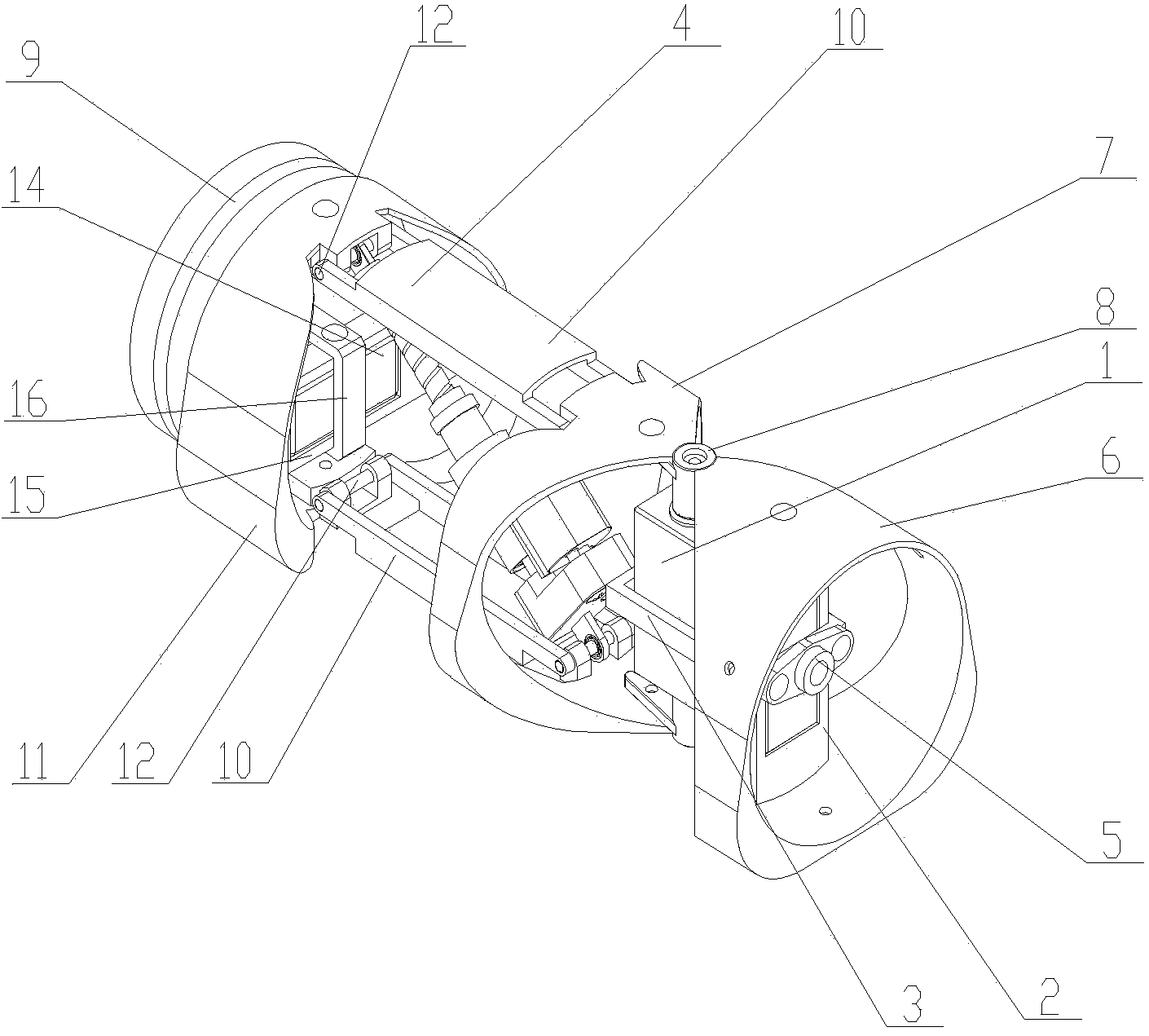
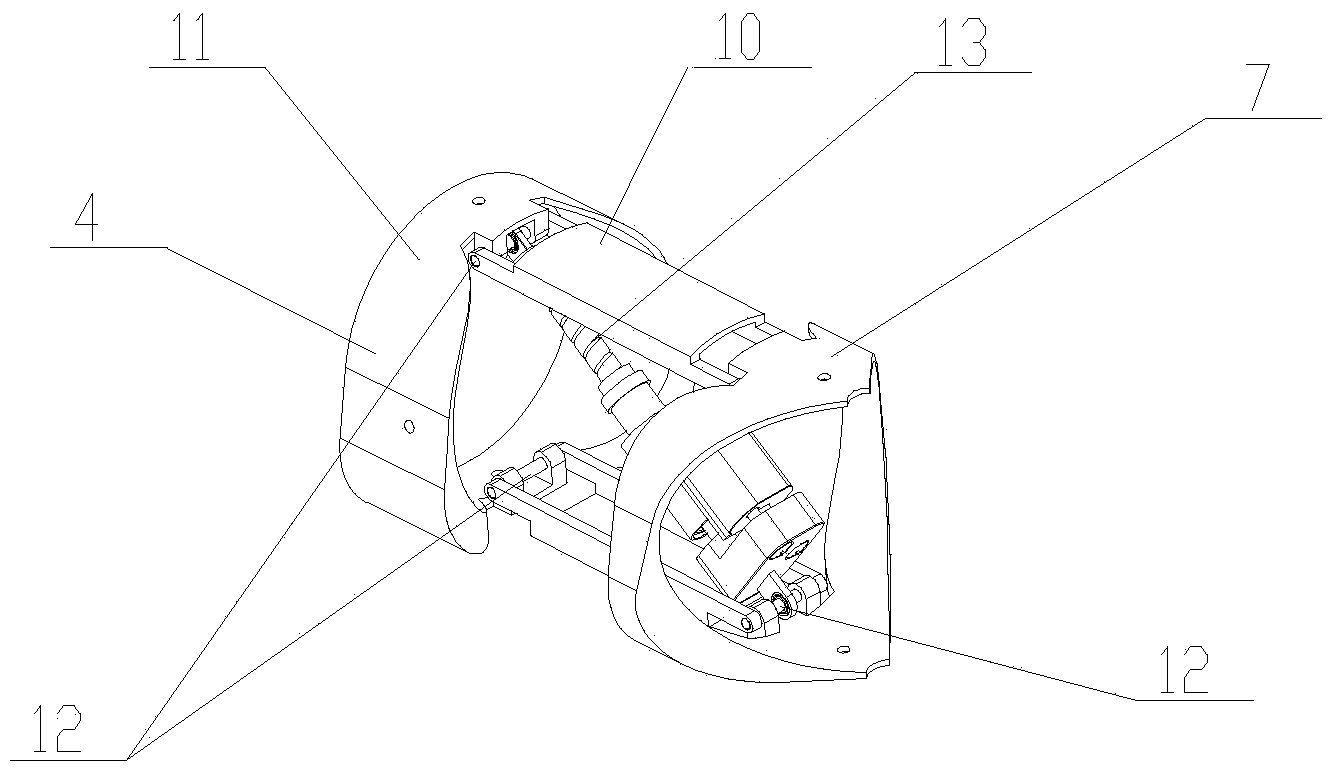
[0027] Such as Figure 1 ~ Figure 6 As shown, a snake-shaped robot based on a quadrilateral mechanism is composed of six identical modules connected end to end. The six modules are: the first module 18, the second module 19, the third module 20, and the fourth module. Module 21, fifth module 22 and sixth module 23; each module has three degrees of freedom motion functions of pitch, yaw, and roll. Among them, the pitch motion is realized by the deformation of the quadrilateral mechanism 4, and the yaw and roll motions are respectively passed through Deflection joint steering gear 1 and roll joint steering gear 14 are implemented; each module consists of quadrilateral mechanism 4, deflection joint steering gear 1, deflection joint steering gear rudder arm 8, third housing 6, roll joint steering gear 14 and roll joint rudder The rudder arm 5 is composed;...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More