

Flexible mechanical arm sliding-mode control designing method based on singular perturbation theory
A singular perturbation theory and flexible manipulator technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as control problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0091] The present invention will be further described in detail below in conjunction with the accompanying drawings and technical solutions.
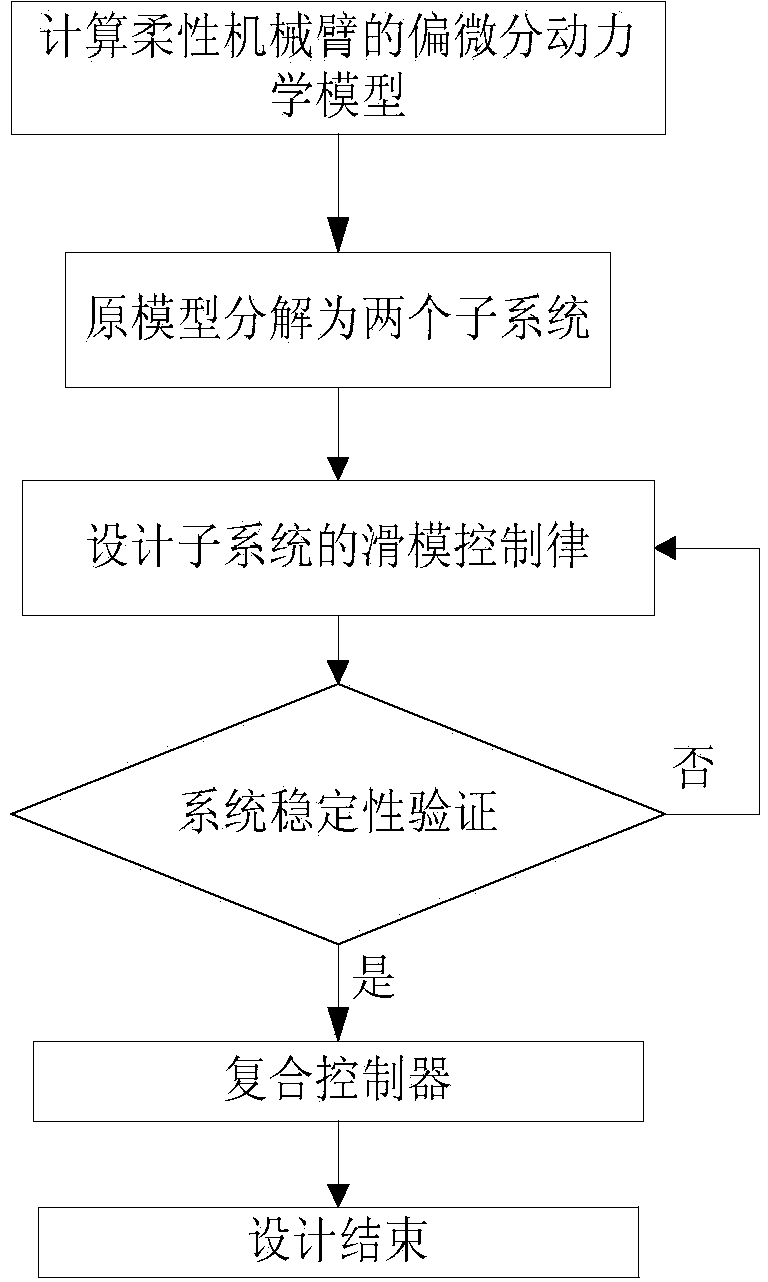
[0092] See figure 1 , the present invention is based on a singular perturbation theory of flexible manipulator sliding mode control design method, the specific steps of the method are as follows:
[0093] Step 1: Dynamic modeling of the flexible manipulator
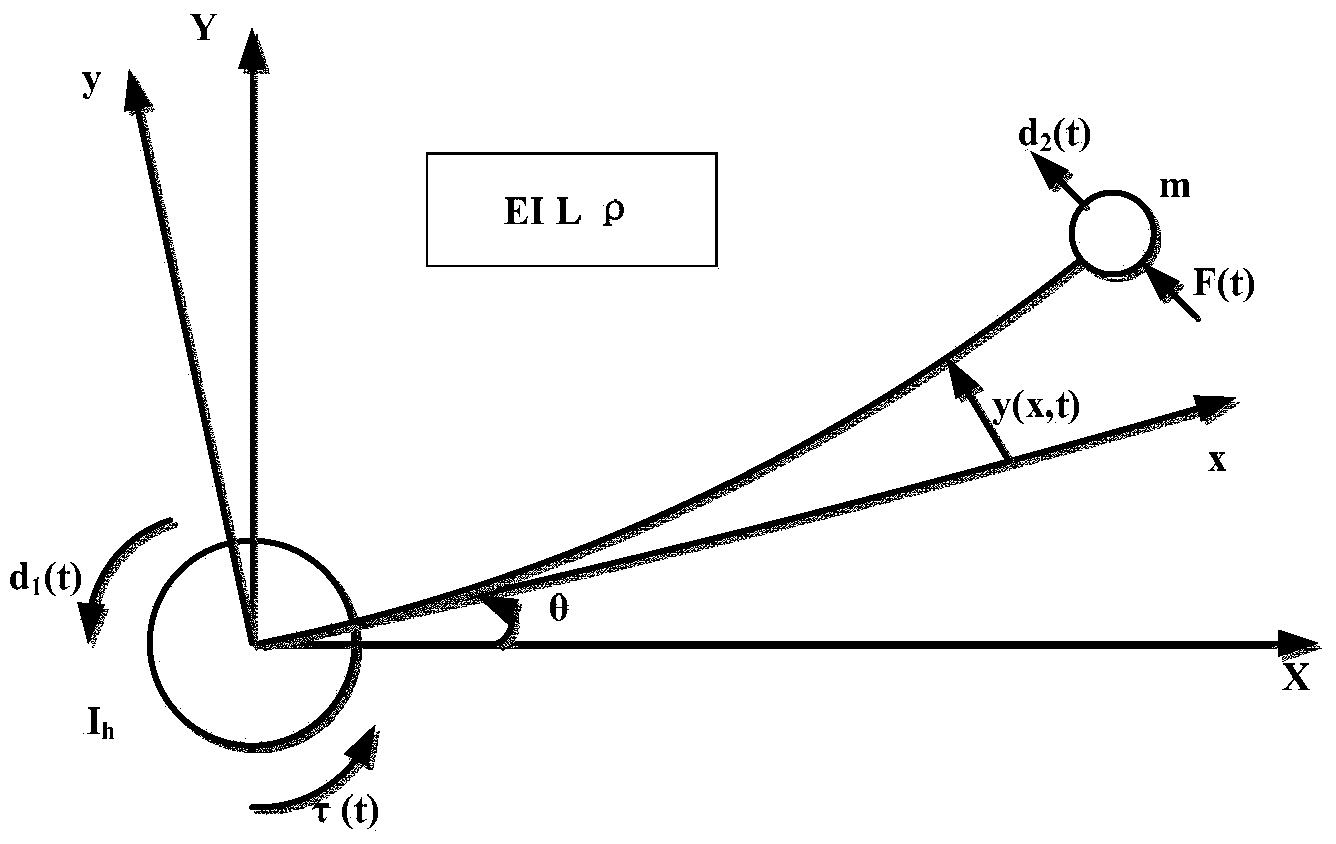
[0094] The model of the flexible mechanical arm that the present invention aims at is as figure 2 As shown, using Hamilton's principle, through the analysis of the system, the PDE model can be obtained.
[0095] The state variables θ(t) and y(x,t) used in modeling represent the joint angle of the manipulator at time t and the elastic deformation at point x, respectively. For convenience, θ(t) and y(x,t) are abbreviated as θ and y(x) respectively in the following analysis.
[0096] The natural boundary conditions of the flexible manipulator are
[0097] y(0)=y x (0) = 0 (1) ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More