

Dynamic control reallocation based unmanned aerial vehicle attitude fault-tolerance control method
An unmanned aerial vehicle, redistribution technology, applied in the direction of attitude control, etc., can solve the problems of enhanced coupling degree of control surface
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0068] Below in conjunction with accompanying drawing and embodiment the invention is described in detail:
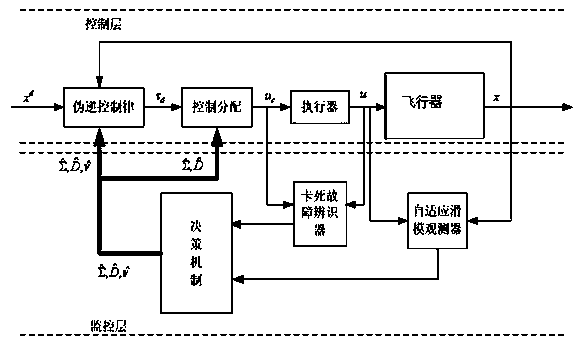
[0069] The invention as figure 2 As shown, dynamic inverse control is adopted, and the proposed method can make the uncertain flight control system with external disturbance have ideal fault-tolerant tracking performance under control surface damage. In space vehicle attitude stabilization control and tracking control, the robust and fault-tolerant control of flight attitude is realized, and good control performance and effect are achieved.
[0070] The present invention provides an attitude fault-tolerant control method of an unmanned aerial vehicle based on dynamic control redistribution, and the system of the aircraft adopts a nonlinear formal system:
[0071] (3.1)
[0072] in: , , , , , , the specific control steps are as follows:
[0073] 1) The parameter u obtained from the control allocation processing of the control layer c , the parameter u...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More