

Real-time path planning method and system
A real-time path planning and routing technology, applied in the field of intelligent transportation, can solve problems such as limited range, sparse data information, poor road section prediction ability, etc., and achieve the effect of improving accuracy, wide data range, and uniform samples
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
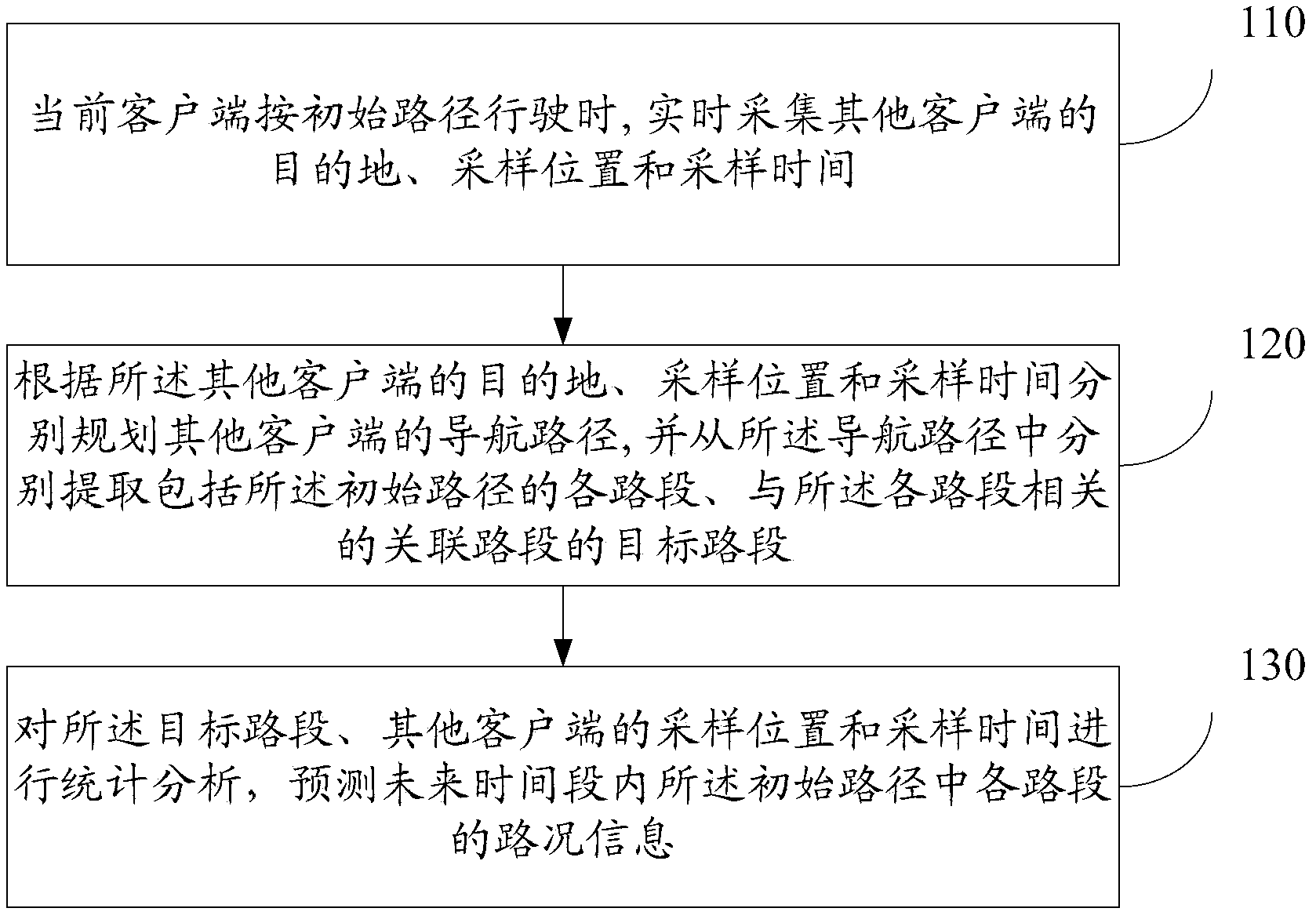
[0053] refer to figure 1 , which shows a schematic flowchart of a method for real-time path planning in Embodiment 1 of the present invention, which may specifically include:
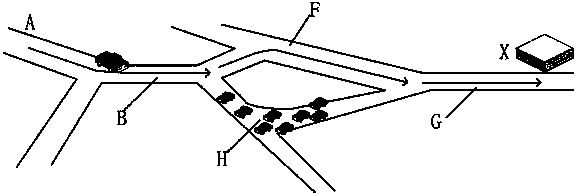
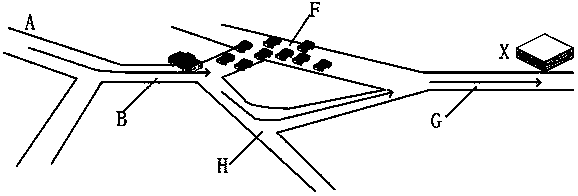
[0054] Step 110, when the current client travels according to the initial route, collect the destination, sampling location and sampling time of other clients in real time;
[0055] refer to figure 2 For example, when the current client starts from A to X, the initial path planned for the client is A-B-F-G, then after the initial path is obtained, the destination, sampling location and sampling time of other online clients are collected. In the present invention, It is stipulated to collect at regular intervals. When the current client plans the initial path, it can use general topology methods such as shortest time for planning, and of course other methods can also be used for planning. In the present invention, for the driving process of the vehicle, due to the time delay in the network, the real-...
Embodiment 2
[0098] refer to Figure 4 , which shows a schematic flowchart of a method for real-time path planning according to Embodiment 2 of the present invention.
[0099] In this embodiment, a road condition prediction model can be constructed based on the historical travel information of users in the entire network, and then referenced when planning a route for the client, further increasing data sources, increasing the breadth and depth of data, and further improving the route. planning accuracy.
[0100] This embodiment can specifically include:
[0101] Step 200, according to the sampling location, sampling time and destination of the current client, use the road condition prediction model to plan the optimal initial route;
[0102] In the embodiment of the present invention, the road condition prediction model is obtained by analyzing the user's travel information; the road condition prediction model is obtained by analyzing the user's historical travel information, including: ...
Embodiment 3
[0141] refer to Figure 5 , which shows a schematic structural diagram of a real-time path planning system according to Embodiment 3 of the present invention, which may specifically include:
[0142] The collection module 310 is used to collect destinations, sampling locations and sampling times of other clients in real time when the current client is traveling by the initial route;
[0143] The associated road segment extraction module 320 is used to plan the navigation paths of other clients respectively according to the destinations, sampling locations and sampling times of the other clients, and respectively extract each road segment including the initial path from the navigation path, and the Describe the target road section of the associated road section related to each road section;
[0144] The congestion judging module 330 is configured to perform statistical analysis on the target road section, sampling locations and sampling times of other clients, and predict road...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More