

Delta parallel-connection mechanical hand for teaching
A technology of manipulators and robotic arms, applied in the field of Delta parallel robots, can solve the problems of no contact and learning of Delta parallel manipulators, fewer Delta parallel manipulators, hindering the development of industrial automation, etc., and achieve increased entertainment, simple and light processing and assembly processes Quantified good effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be further described below in conjunction with specific examples.
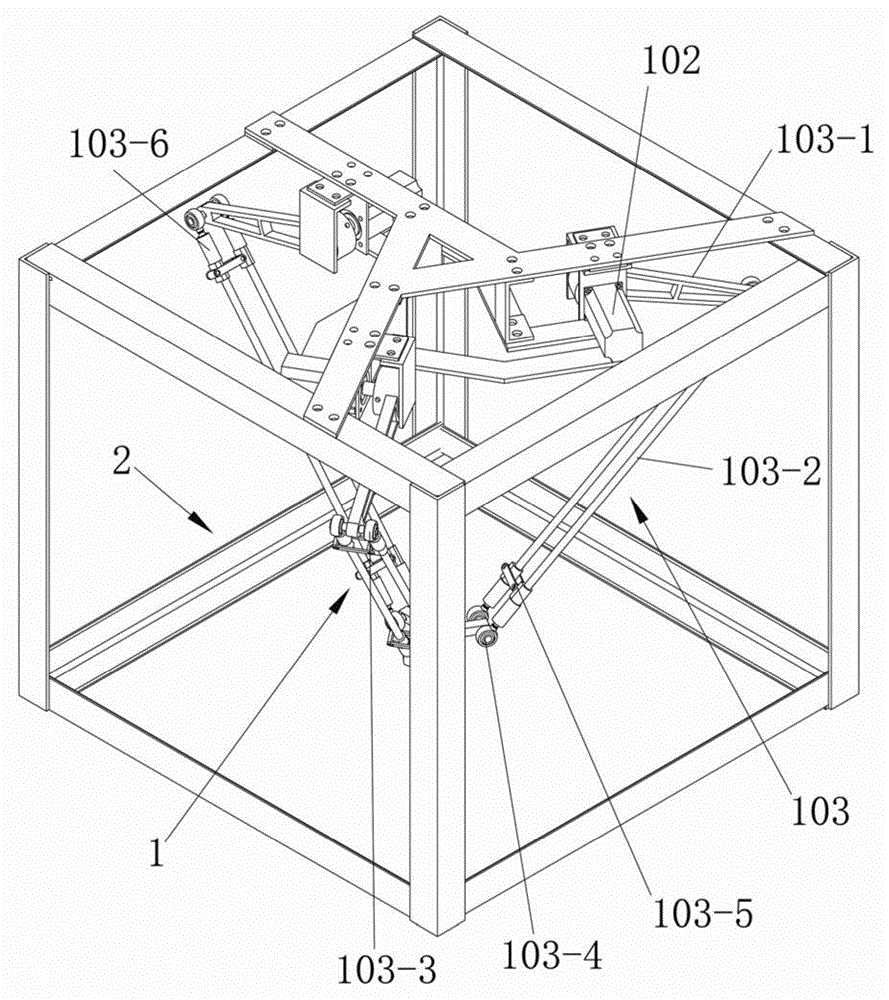
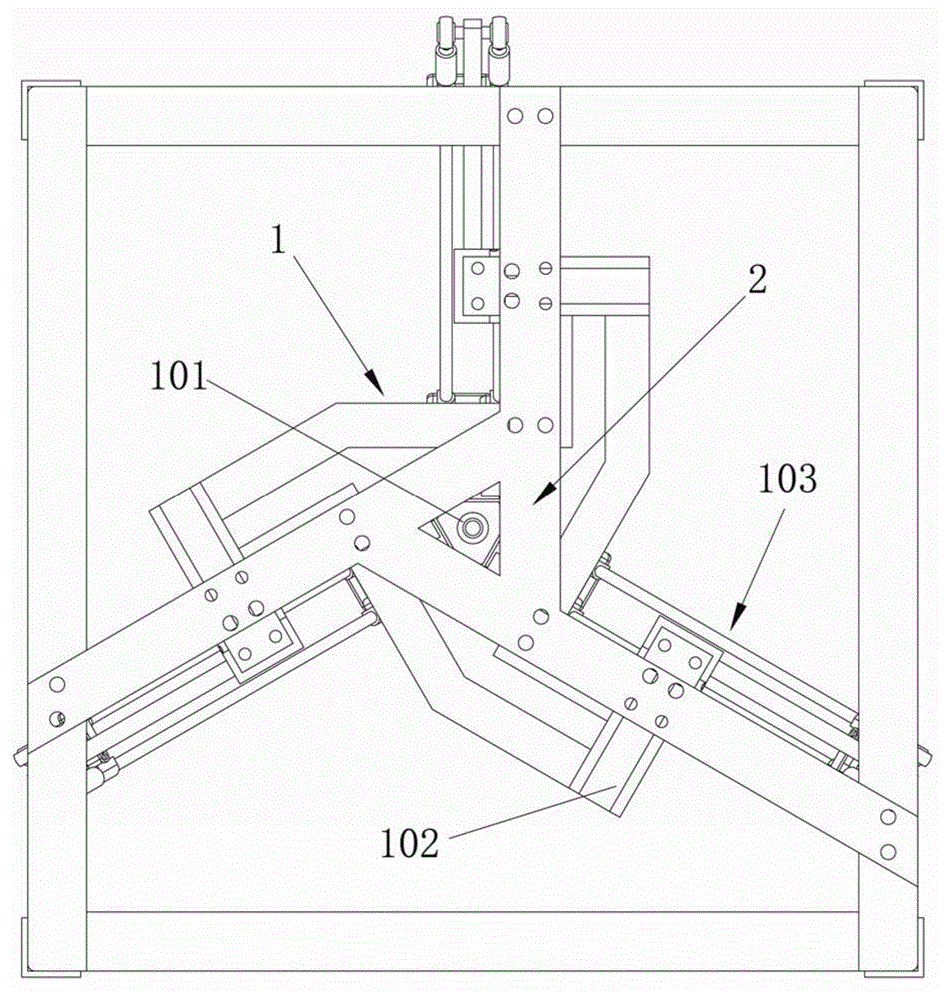
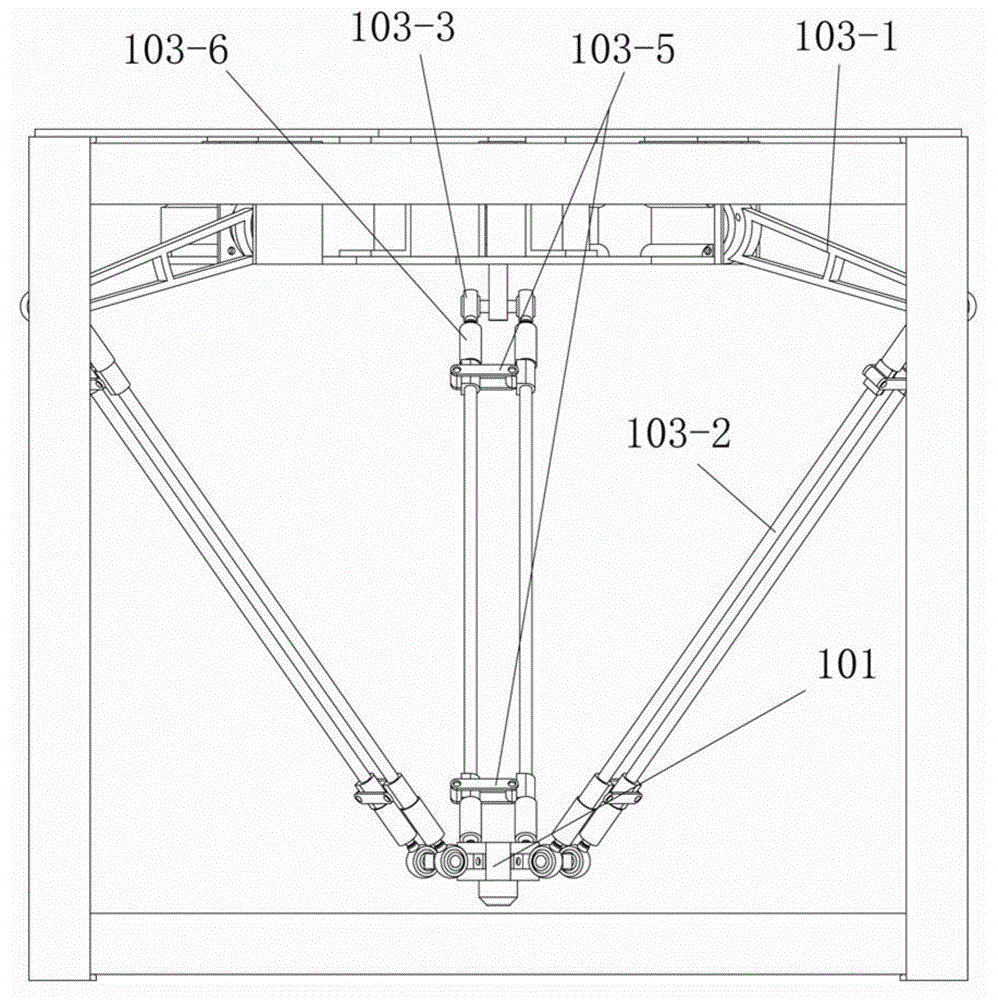
[0020] Such as Figure 1 to Figure 3 As shown, the Delta parallel manipulator used for teaching described in this embodiment includes a Delta type parallel manipulator body 1 and a frame 2 (specifically a cube frame) for carrying the Delta type parallel manipulator body 1, The Delta parallel manipulator body 1 includes a detachable end effector 101, three servo motors 102 and three sets of robotic arms 103 connected to the end effector 101, wherein the three servo motors 102 are connected to the three The groups of mechanical arms 103 correspond one-to-one, and a group of mechanical arms 103 is driven by a servo motor 102; the three servo motors 102 are respectively fixedly installed on the top of the frame 2, and are symmetrical about the center of the geometric triangle, and are respectively connected to the respective corresponding The mechanical arm 103 is connected; the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More