

Ship dynamic positioning control method based on inverse system and internal model control
A control method and dynamic positioning technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as difficulty in constructing Lyapunov function, insufficient generalization ability of neural network control, and learning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0053] The present invention is described in further detail by the following examples.
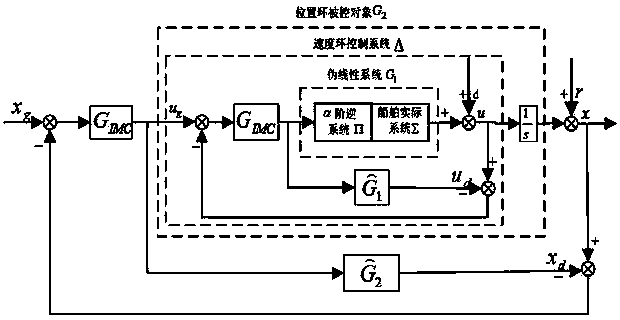
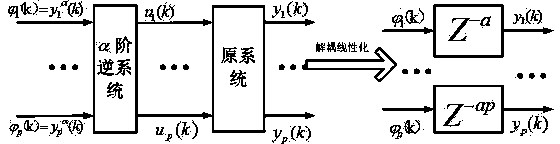
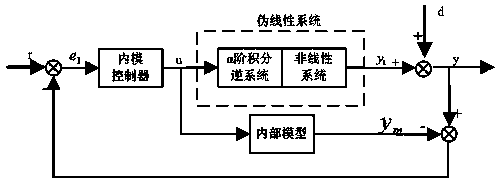
[0054] The ship dynamic positioning control method based on the inverse system and internal model control algorithm of the present invention adopts the α-order inverse system principle to perform feedback linearization on the coupled nonlinear ship motion mathematical model to obtain a pseudo-linear system; The system is controlled; the specific steps are as follows:
[0055] 1) Establish a ship motion model
[0056] According to the experimental ship of Guangdong University of Technology Marine Laboratory, a 2.8m supply ship reduced by 26:1 is used as the control object. The model of the ship in still water under low frequency is as follows:
[0057] ( m - X u · ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More