Networked brushless direct current motor time-delay compensation and control method using active-disturbance-rejection control technology
A technology of brushed DC motor and active disturbance rejection control, which is applied in the direction of adaptive control, general control system, control/regulation system, etc., and can solve the problems of uncertain dynamic anti-interference ability and weak ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] In order to make the technical scheme and design idea of the present invention clearer, a detailed description will be given below in conjunction with the accompanying drawings.
[0061] refer to Figure 1 to Figure 5 , a networked brushless DC motor time delay compensation and control method using active disturbance rejection control technology, the method includes the following steps:
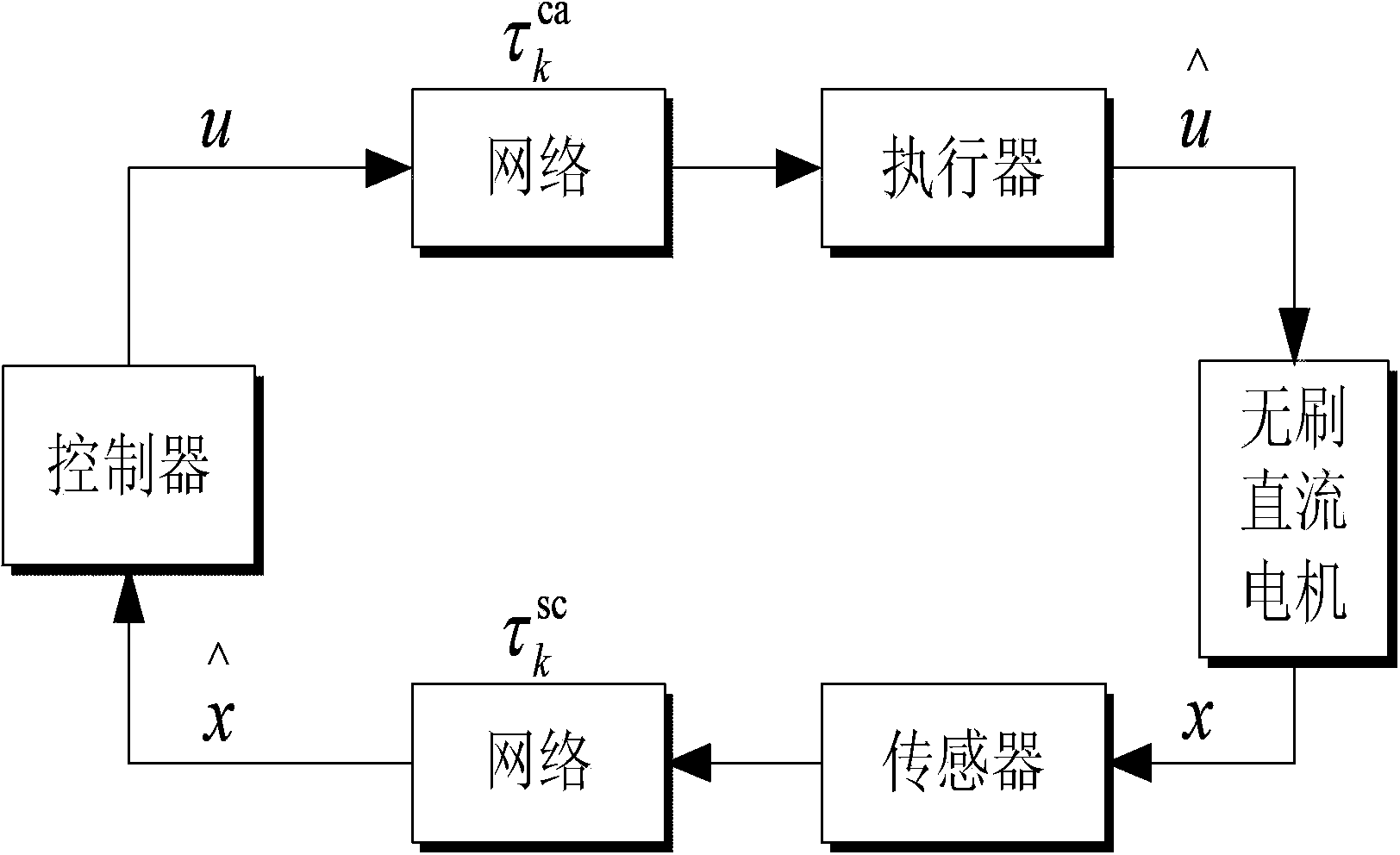
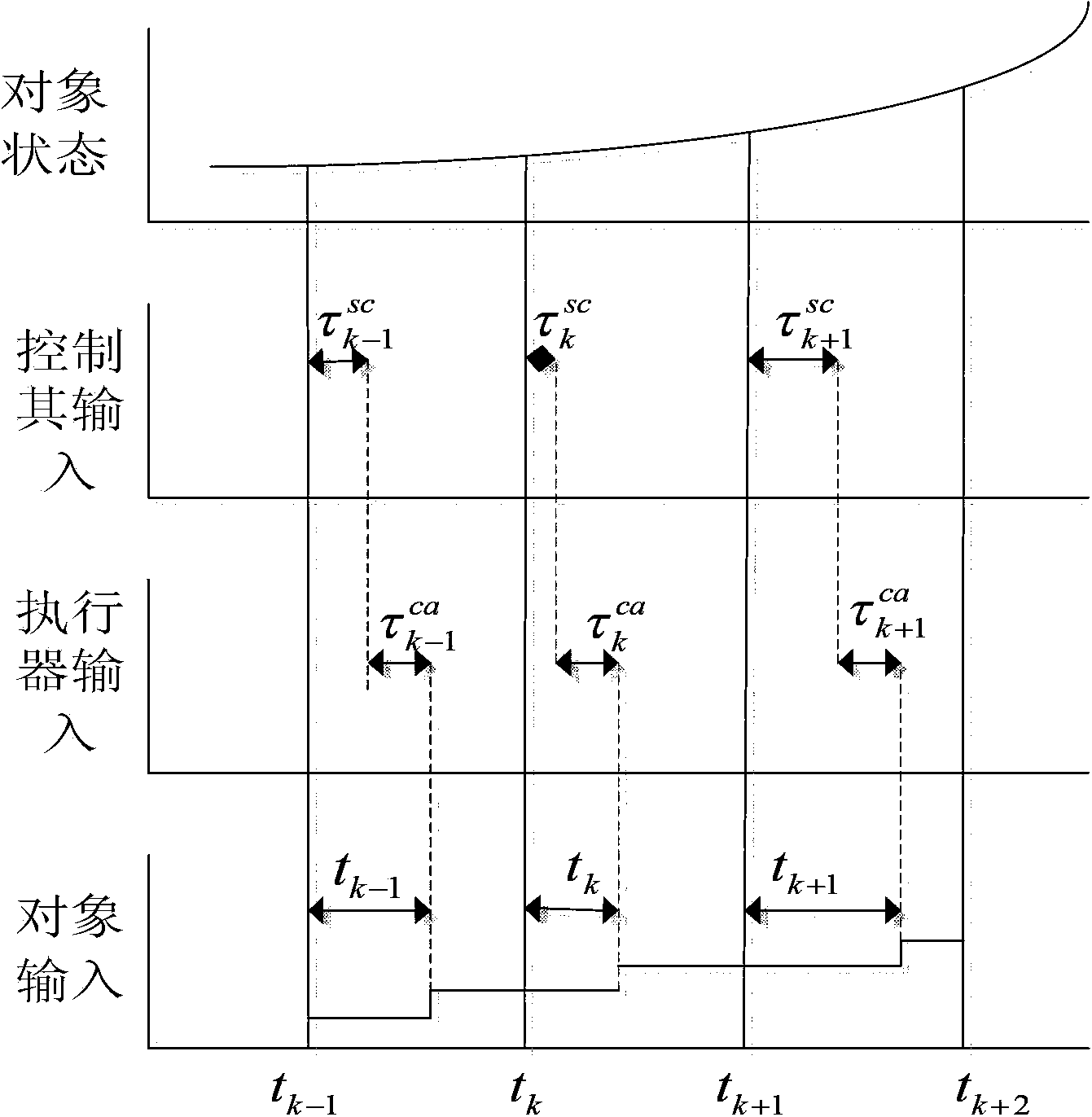
[0062] Step 1) Establish a BLDC motor control system model with time-varying network-induced delay.
[0063] Considering that the network-induced delay is less than one sampling period, the networked brushless DC motor control system is described as a discrete-time linear time-varying system with one-step input delay, and then the uncertain dynamic part of the system caused by the time-varying delay Described as additive noise of the system, the specific process includes:
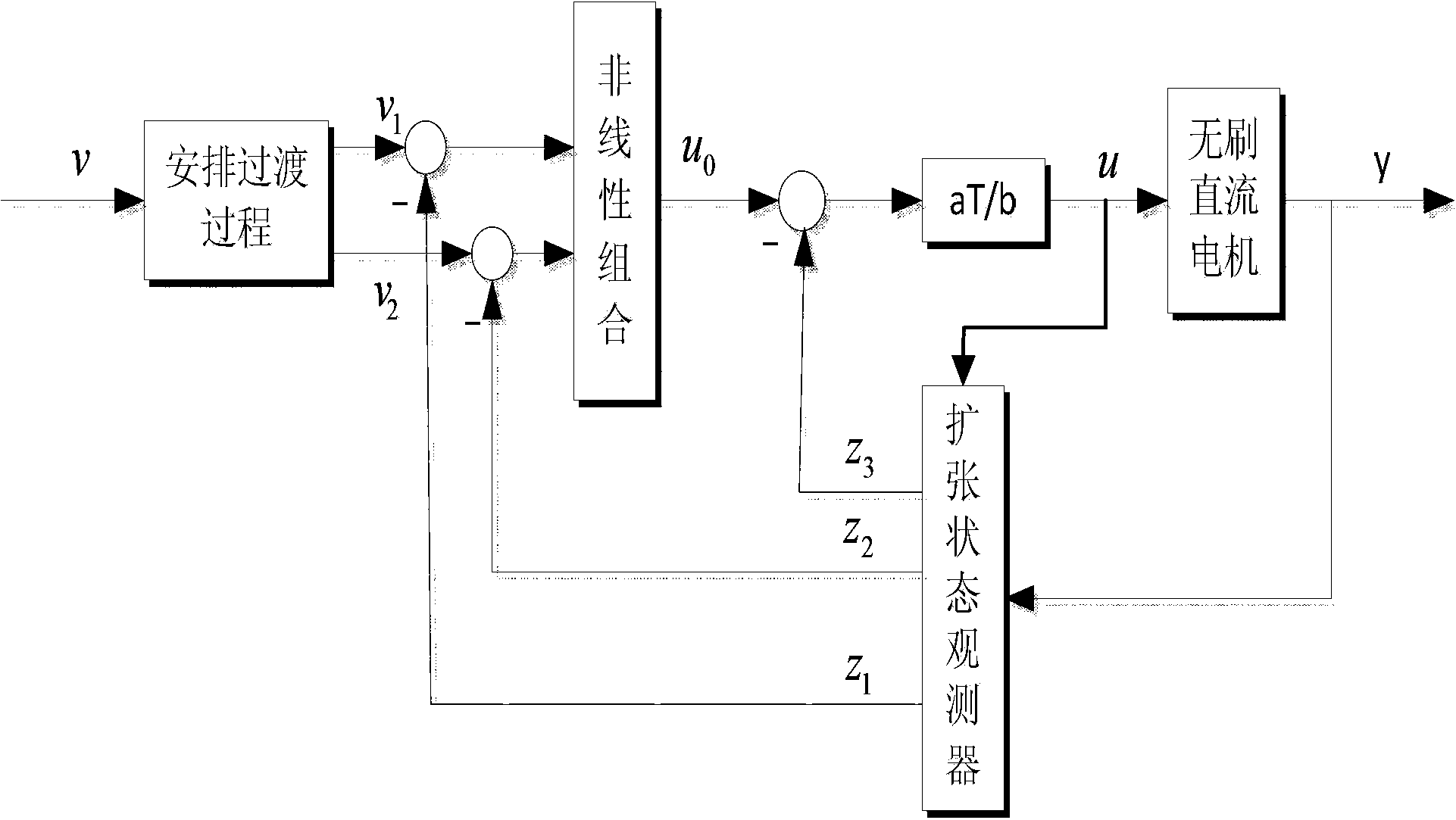
[0064] 1.1) Establish the linearized transfer function model of the brushless DC motor control system
[006...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More