

Capture mechanism and multi-level lead screw non-cooperative target docking mechanism
A technology of docking mechanism and lead screw, which is applied in the field of aerospace to achieve the effect of avoiding tilt, simplifying mechanism and avoiding gap escape
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
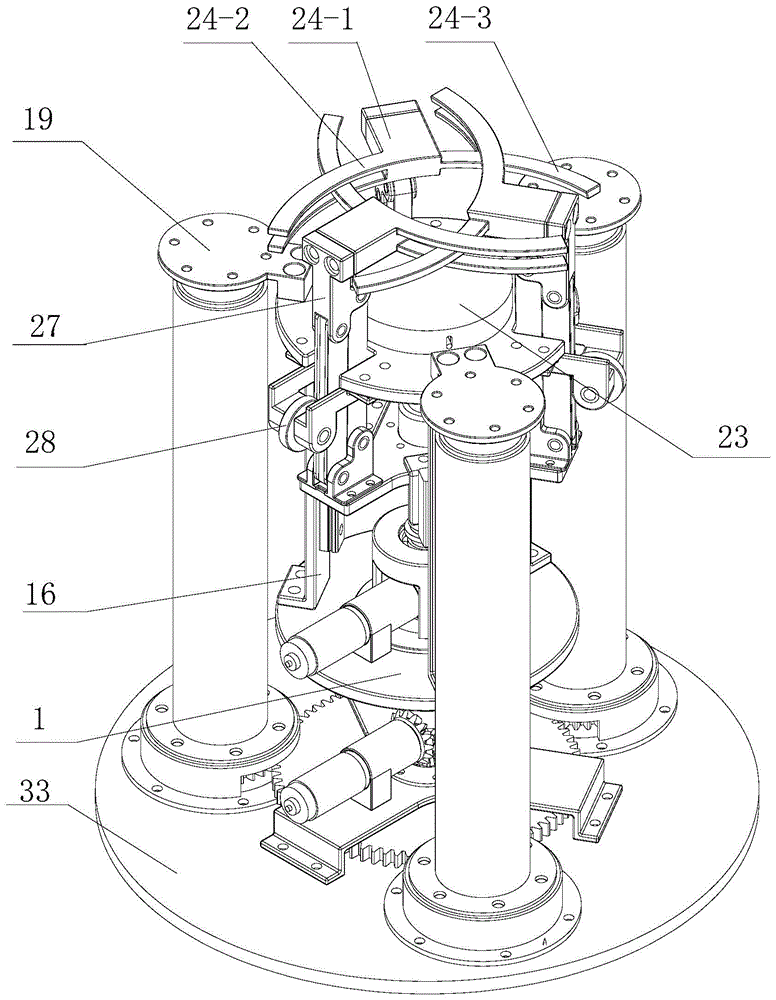
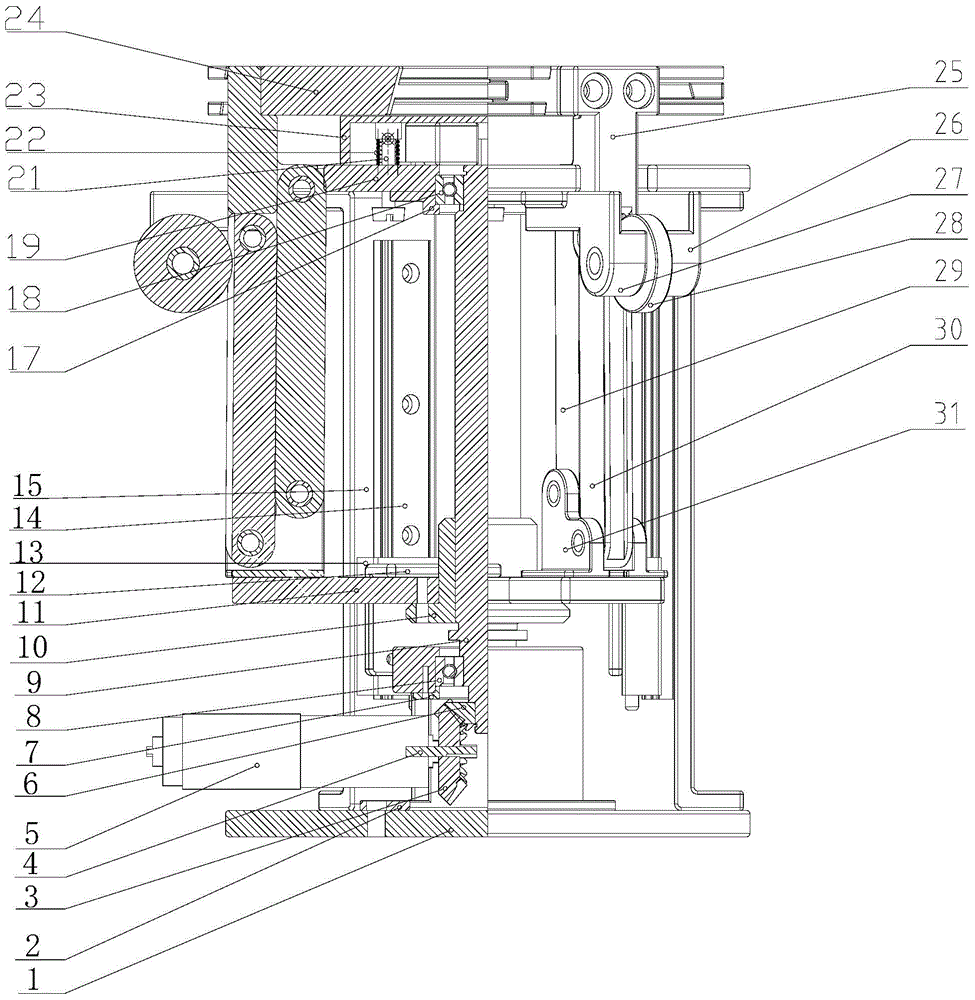
[0010] Specific implementation mode one: combine figure 1 with figure 2 Describe this embodiment, which includes a base 1, a bevel gear pair, a motor 5, a main screw 9, a nut 10, a support frame 11, a gripper end mechanism 24, three sliders 13, and three slide rails 14 , three slide rail brackets 16, upper cover 19, three rollers 28 and three linkages and three sets of linkages, the output shaft 4 of the first motor 5 is connected to the input end of the bevel gear pair, and the bevel gear pair The output end of the main screw 9 is connected with one end of the main screw 9. The other end of the main screw 9 passes through the support frame 11 and then the nut 10 is installed. The nut 10 is fixed on the upper surface of the support frame 11. The three slide rail brackets 16 The cloth is arranged and fixed between the base 1 and the upper cover 19 and is evenly distributed along the circumferential direction of the base 1. The slide rail 14 is fixed on the side wall of each s...
specific Embodiment approach 2
[0011] Specific implementation mode two: combination figure 1 To illustrate this embodiment, the terminal mechanism 24 of this embodiment includes three grippers, which are respectively defined as a first gripper, a second gripper and a third gripper, and each gripper is connected by a connecting handle 24- 1. The first curved rod 24-2 and the two second curved rods 24-3 are integrated, one side of the connecting handle 24-1 is fixedly connected to one end of the first curved rod 24-2, and the connecting handle 24-1 The other side is fixedly connected with two second arc rods 24-3, and the two second arc rods 24-3 are arranged side by side from top to bottom, and each hinge frame 25 is fixedly connected with the corresponding connecting handle 24-1, and the second The first arc rod of the first grabbing part is intersected with the two second arc rods of the second grabbing part, and the first arc bar of the second grabbing part is intersected with the two second arc bars of t...
specific Embodiment approach 3
[0012] Specific implementation mode three: combination figure 1 with figure 2 Describe this embodiment, present embodiment also comprises buffer platform 23, a plurality of buffer spring columns 21 and a plurality of buffer springs 22, buffer platform 23 is located on the upper end surface of loam cake 19, and a plurality of buffer spring columns 21 are contained in buffer platform 23 inside, and each buffer spring column 21 is equipped with a buffer spring 22. Other implementation manners are the same as the specific implementation manner 1.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More