

Throwable scout robot
A technology for a robot and a driving motor, applied in the field of reconnaissance robots, can solve the problems of the robot's limited anti-drop ability, and it is difficult to take into account the lightweight and anti-shock performance, so as to achieve the effect of protection from impact damage, compact structure, and weight reduction.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention will be further described in detail below in conjunction with the accompanying drawings.
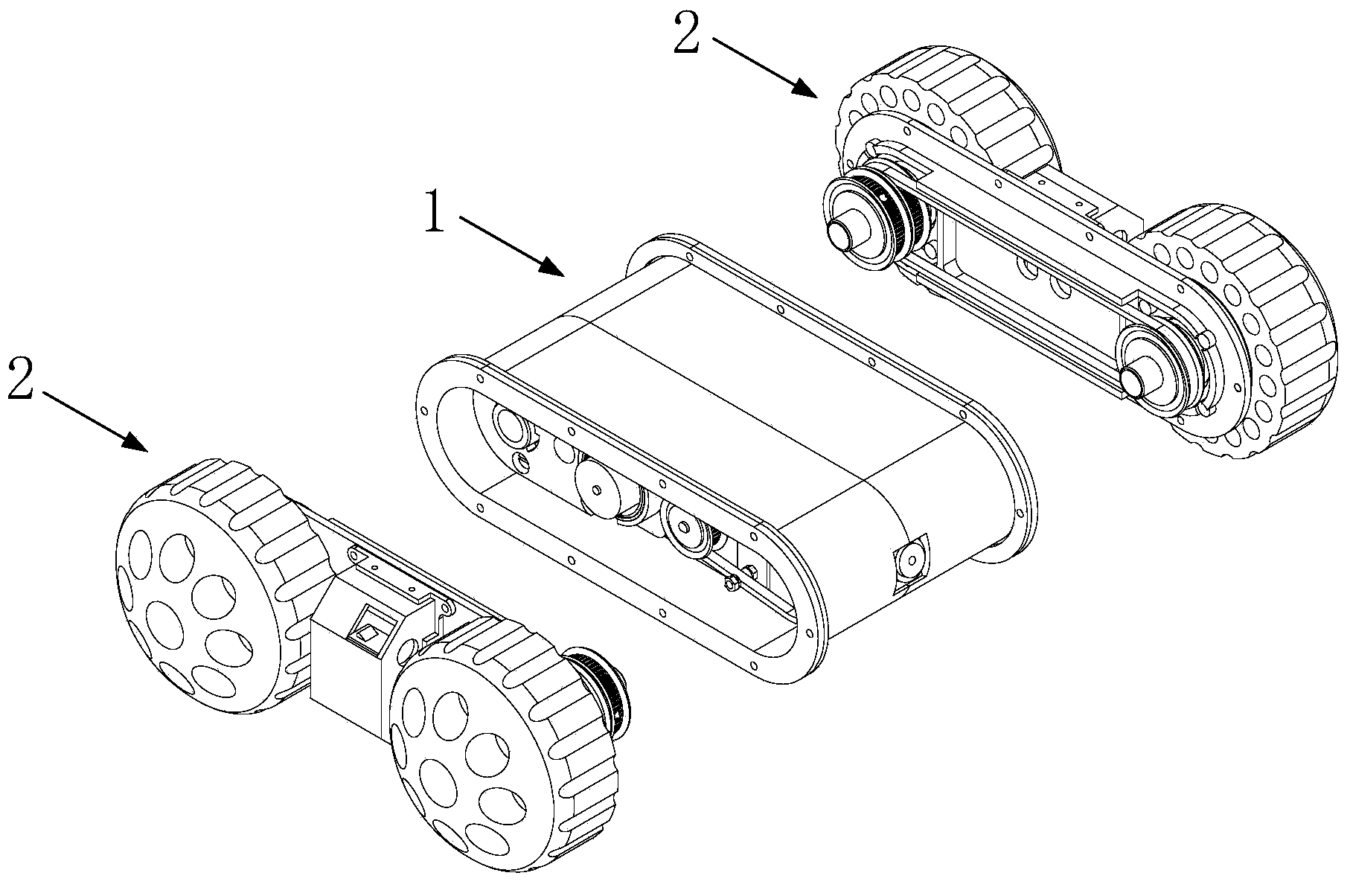
[0039] The throwable type reconnaissance robot of the present invention is made of body module and the motion module that body module left and right sides are installed, as figure 1 shown.
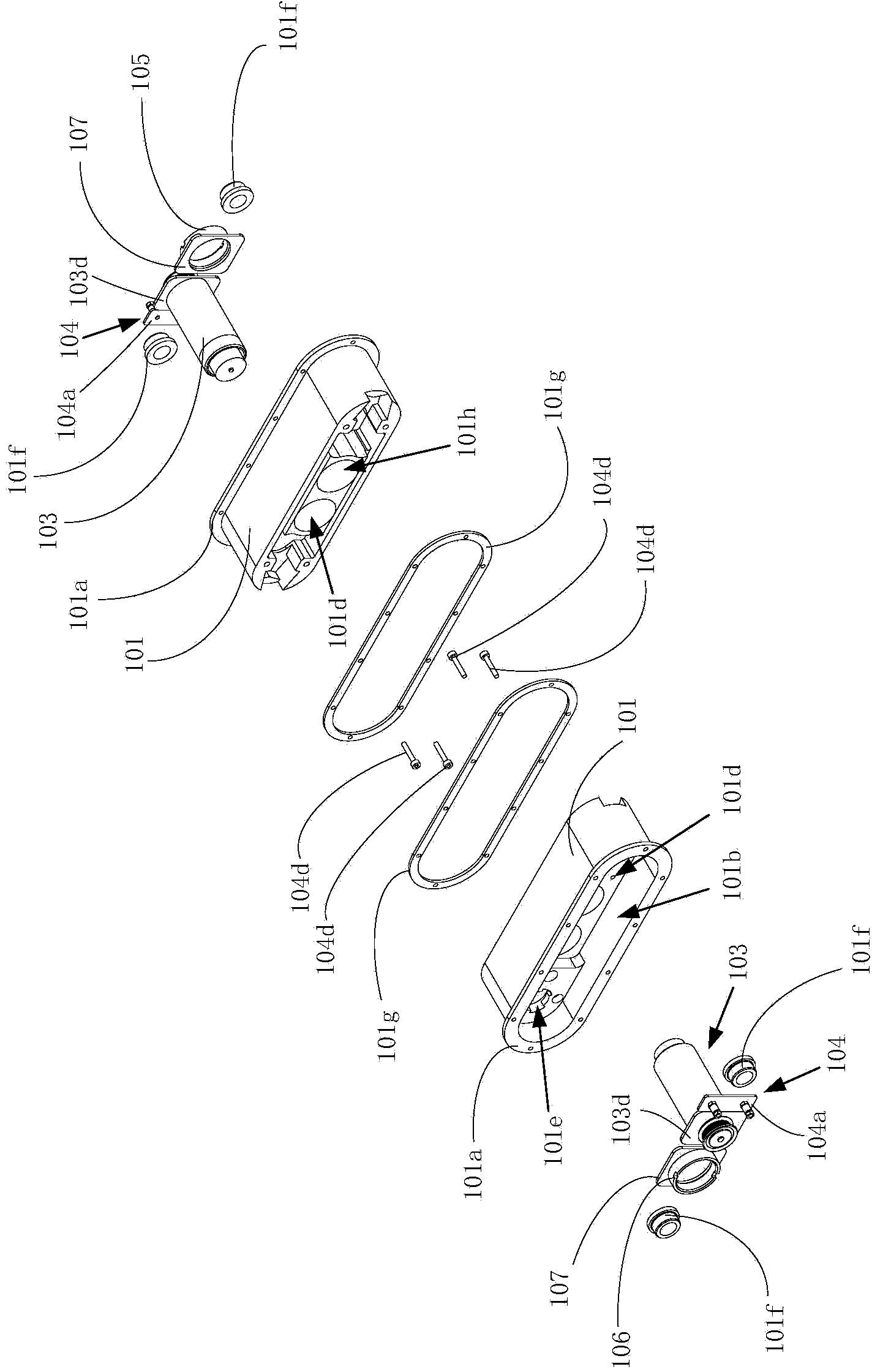
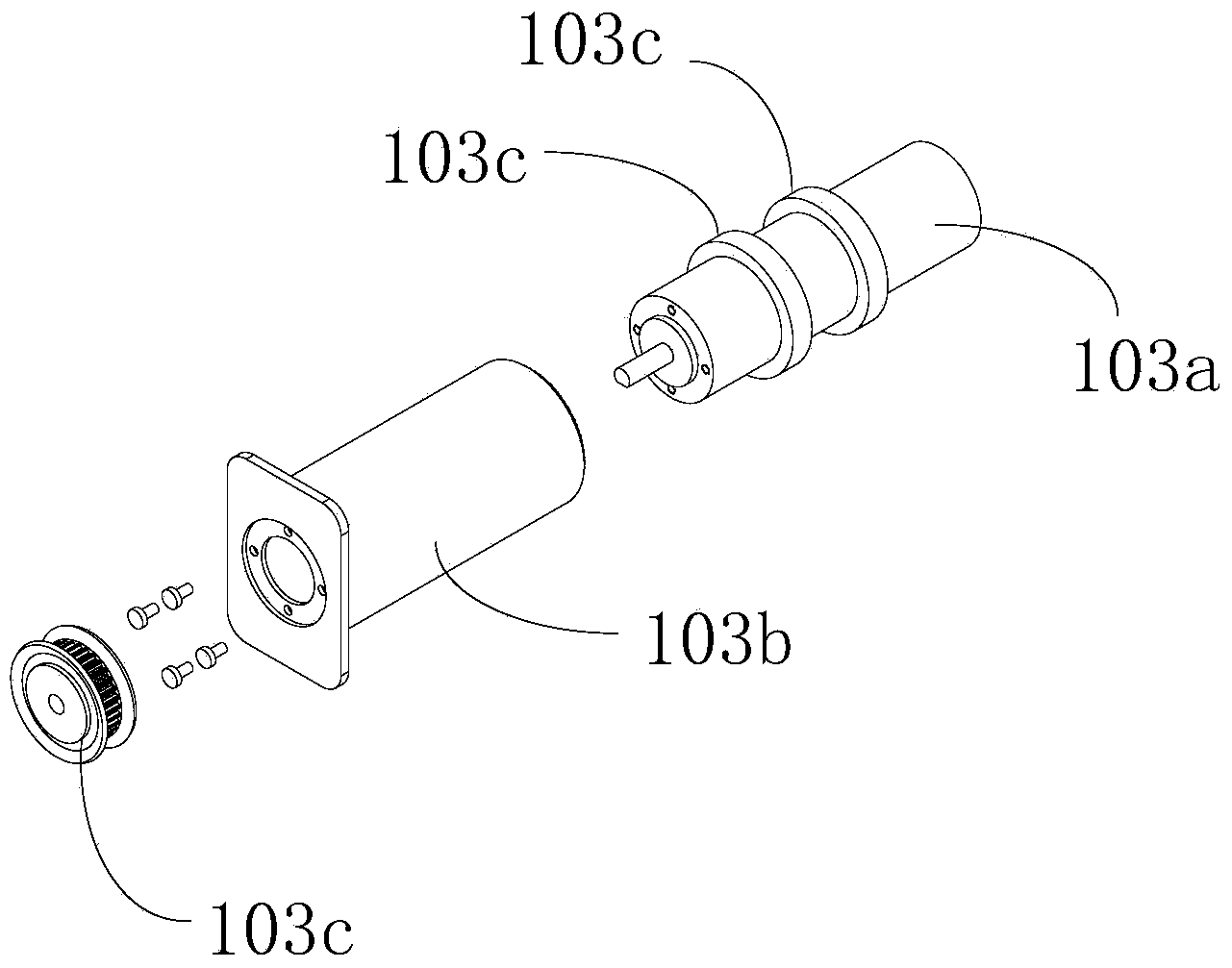
[0040] The body module 1 includes two parts, a left body module and a right body module, both of which have the same structure, and are all composed of a rubber body 101, a wheel shaft top cover 102, a drive assembly 103 and a tensioning device 104, as shown in FIG. figure 2 Shown; Among them, the rubber body 101 is made of rubber material as a whole, the outer surface is used as the installation surface of the movement module, and there is a protruding rubber skirt 101a in the circumferential direction. A groove 101b is designed on the mounting surface of the motion module, and the bottom surface of the groove 101b is designed with a driving assembly installation chann...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More