

Underwater motion array multi-target detection and position estimation integrated method
An azimuth estimation and multi-target technology, applied in the direction of measuring devices, radio wave measurement systems, sound wave reradiation, etc., can solve the problems of inability to give azimuth estimation at the same time, poor performance, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
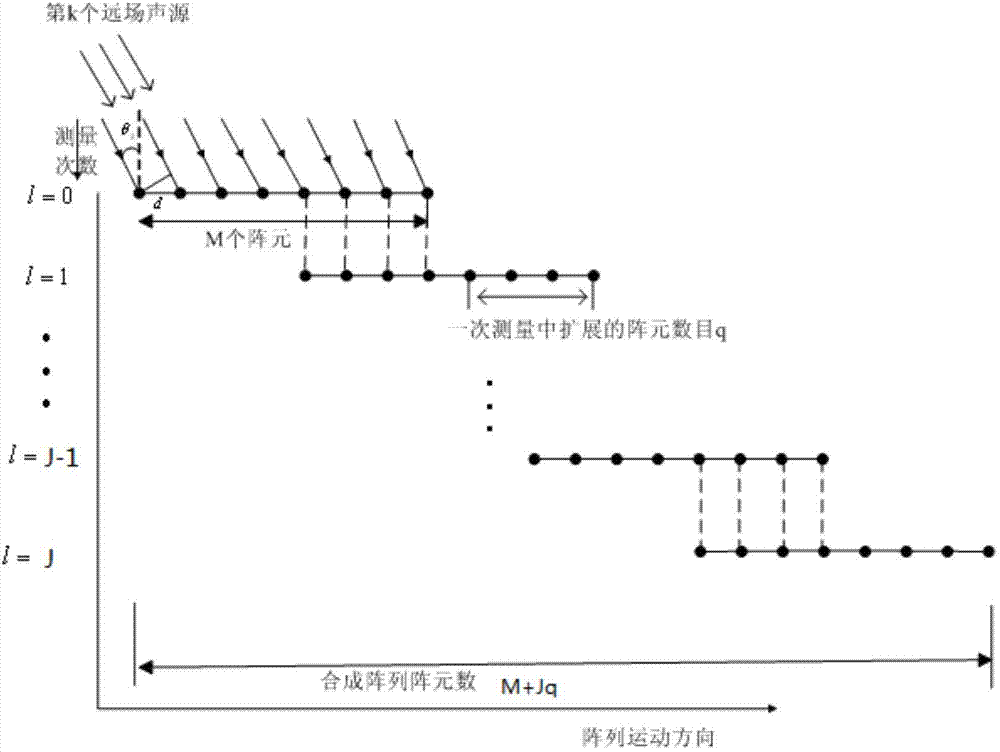
[0033] 1. Motion array signal model
[0034] Consider M array elements, a uniform linear array with a spacing of d, and the array moves in a straight line at a speed v along the x-axis of the reference coordinate. The K frequencies located in the far field of the receiving array are f 0 The narrowband signal source s k (t) respectively by θ k The incident angle reaches each element of the receiving array. During the entire measurement time T, the sampling frequency is f s , the sampling time interval is Δt and t i =i*△t(i=1,2,...,N, N is the total number of sampling points). At this time at t i The received data of the nth (n=1,2,...,M) array element at any time can be expressed as
[0035] x n ( t i ) = Σ k = 1 K A k ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More