

Robot for installing groove-type large-caliber pipeline connector in deepwater complex environment
A technology for large-diameter pipes and operating robots, which is applied in the field of large-diameter pipe grooved connector installation and operating robots, and can solve the constraints of low automation, reliability, control performance and operating flexibility, and the scope of application of grooved connectors , Install the problem of lagging research and development of operating robots, achieve high mobility and flexibility, ensure balance and stability, and simplify the structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] The present invention will be described in detail below in conjunction with the accompanying drawings.
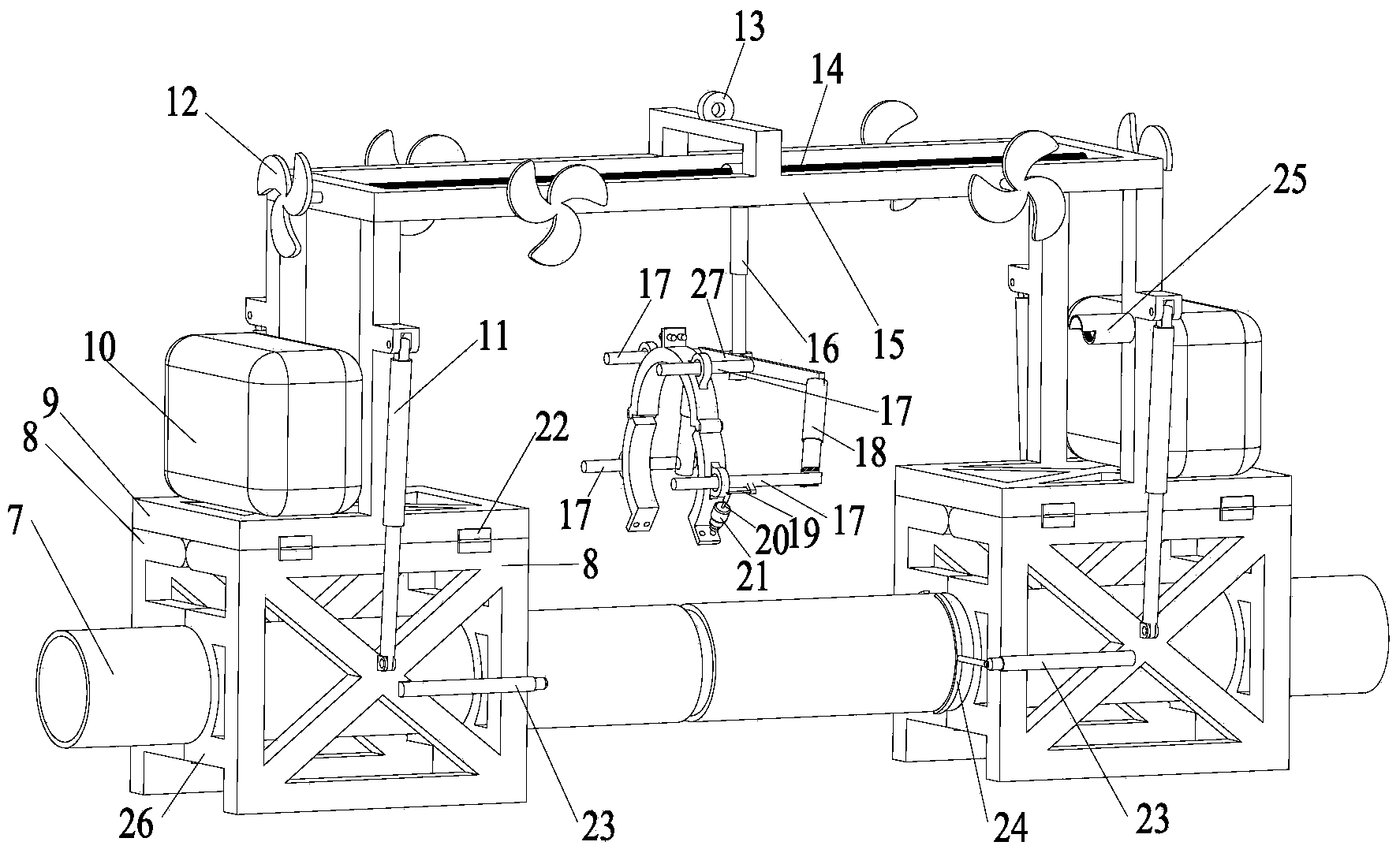
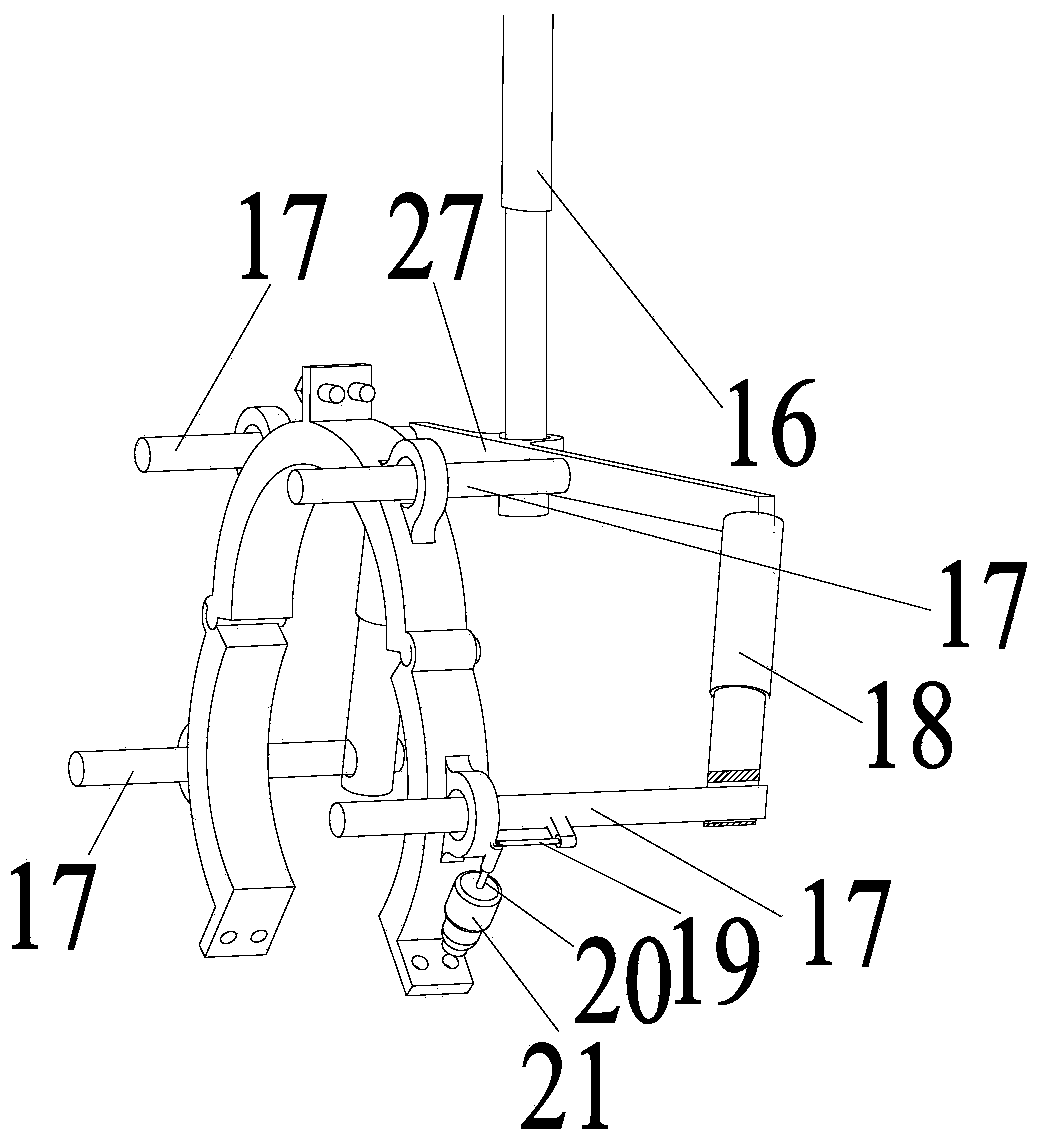
[0060] Such as figure 1 , figure 2 As shown, the operation robot for installing large-diameter pipeline grooved connectors in complex deep water environments of the present invention includes a water pressure sensor connected to an external mother ship in communication, a power supply line connected to an external mother ship, and a hydraulic oil delivery pipeline; it is characterized in that , the overall shape is similar to that of a gantry crane, including the beam part, the left mechanism, the right mechanism and the mechanical arm; the left mechanism and the right mechanism are both box-shaped frame structures, and the left and right hands are symmetrical. end;
[0061] Such as Figure 4 As shown, the above-mentioned left mechanism includes a fixed side wing 8 and a fixed upper plate 9; the above-mentioned fixed side wing 8 is an opening and closing structur...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More