

Intelligent trolley for saving and taking books in library
A library and intelligent technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of increased labor intensity, large manpower cost, and low labor efficiency, so as to reduce labor load, high efficiency, and fast work speed Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The implementation of the present invention will be described in detail below in conjunction with the drawings and examples.
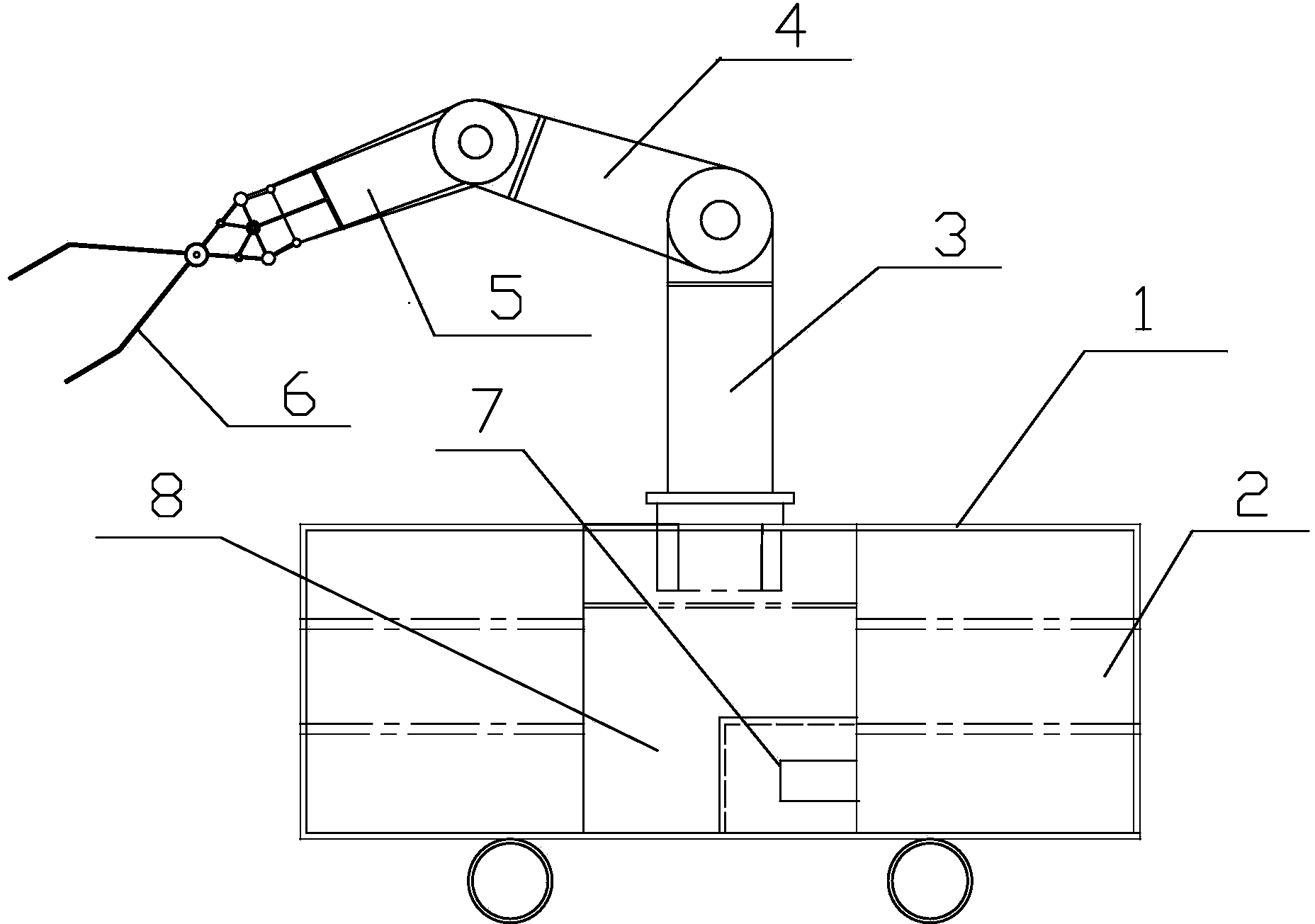
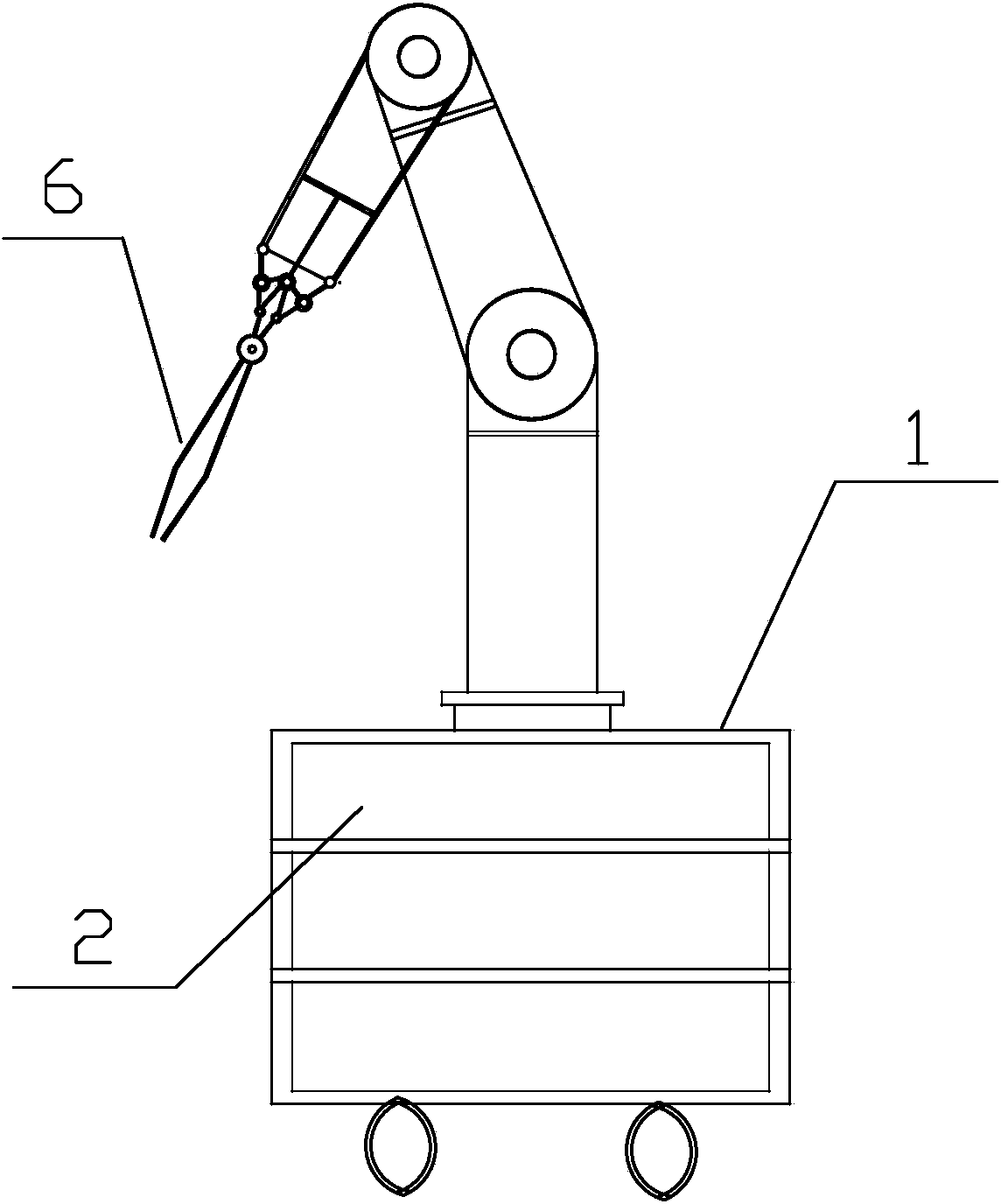
[0018] Such as figure 1 and figure 2 As shown, the present invention is an intelligent access book trolley for a library, including a car body 1, a book storage drawer 2, a PLC controller, a mechanical arm, a manipulator 6, an engine 7, a hydraulic oil tank 8 and a book barcode scanner device. The book storage drawer 2 has a unique number, and each book storage drawer 2 is connected to an independent hydraulic telescopic mechanism to control its opening and closing, and the stepping motor controlling the hydraulic telescopic mechanism is connected to a PLC controller.
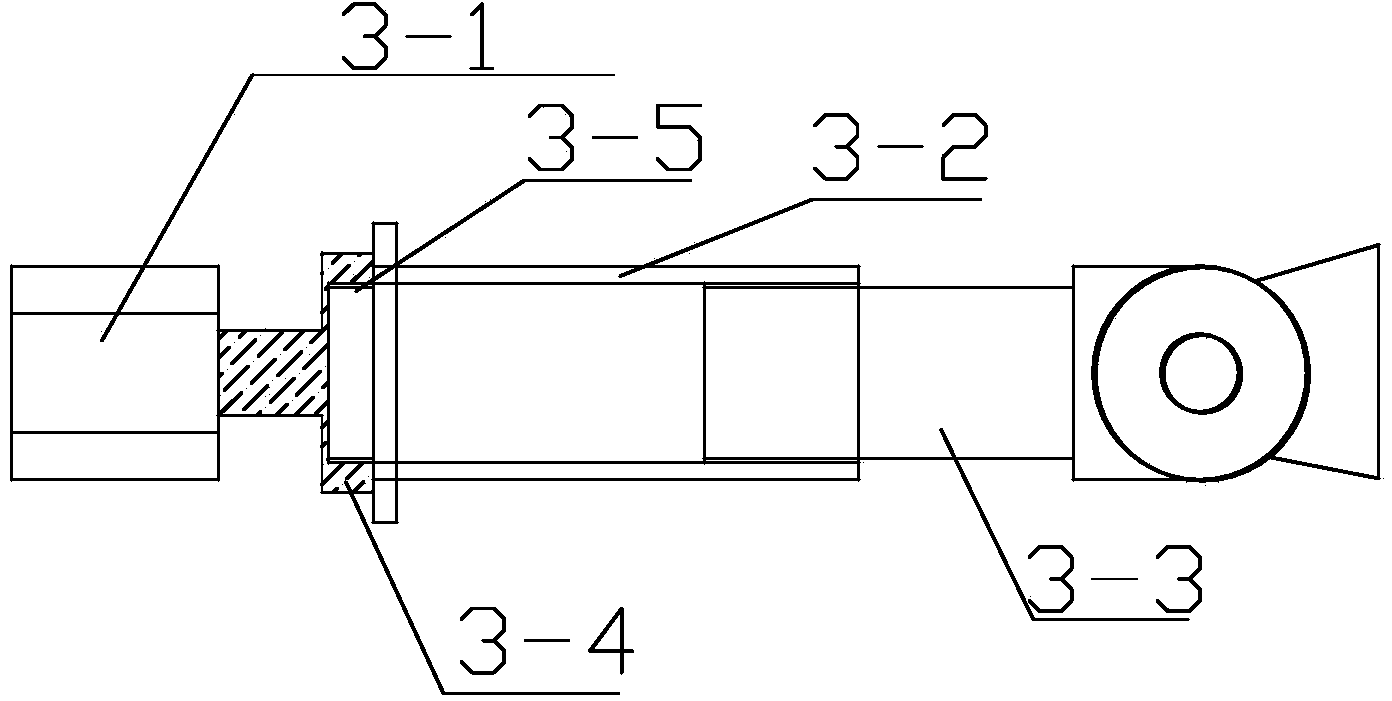
[0019] Among them, the mechanical arm has three stages. The engine 7 drives the hydraulic oil in the hydraulic oil tank 8 to complete the telescopic action. One end of the first-stage telescopic arm 5, the other end of the last-stage telescopic arm 5 is connected to the manip...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More