Mobile robot positioning method based on stereoscopic vision
A technology of mobile robot and positioning method, which is applied in the direction of instruments, photo interpretation, measuring devices, etc., and can solve the problem that the monocular vision positioning system is difficult to reconstruct the depth information of image points, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
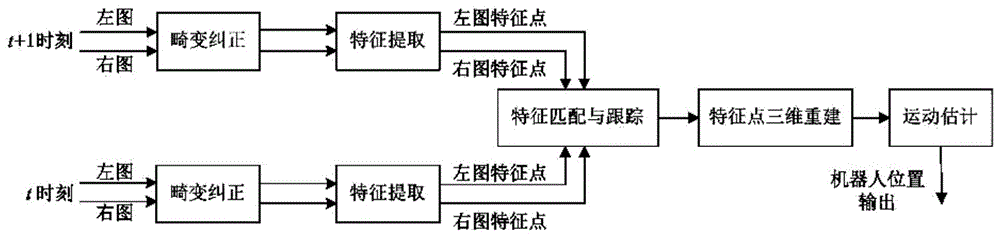
[0081] Such as figure 1 As shown, it is an operation flowchart of the mobile robot positioning method based on stereo vision in the present invention, and the operation steps of the method include:
[0082] Step 01 Image acquisition and preprocessing
[0083] First, a binocular stereo camera is installed on the mobile robot, the camera is calibrated by Zhang Zhengyou's camera calibration method, and the image distortion is corrected by Bought distortion correction method.
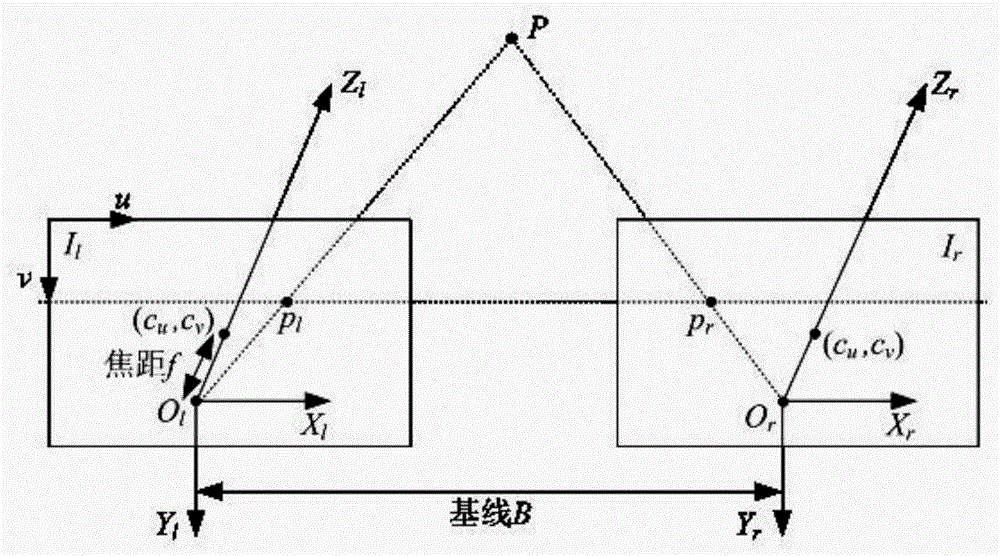
[0084] Such as figure 2 As shown, it is a schematic diagram of the parallel binocular camera coordinate system after calibration and distortion correction in the present invention. Let O l , O r are the optical centers of the left and right cameras respectively, the distance between the optical centers of the two cameras is the baseline B, and the unit is meters; I l and I r are the images obtained by the left and right cameras respectively, and the image resolution is col×row; the coordinates of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More